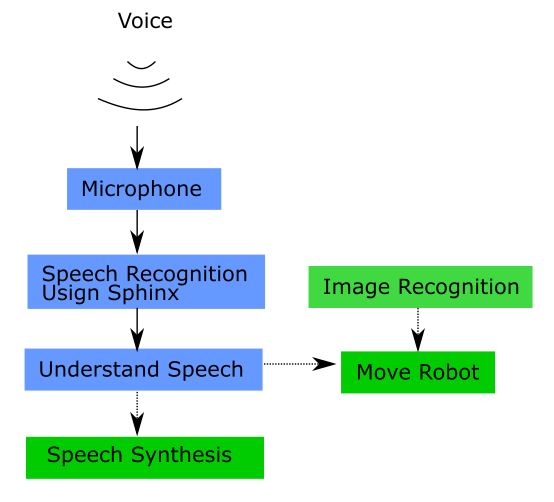
The robot constantly uses information provided by the Pi Camera and OpenCV library to navigate itself towards a green or blue object when prompted. During the navigation, there are four states: Polling, Moving Towards Object, Move Until Lost, and Done. We describe each state below.
Polling
The robot begins in polling state. It looks for the object for 1.3 milliseconds. If it finds a valid object, then it moves into the Moving Towards Object state. If it does not, then the robot turns 30 degrees, and continues looking for the object in the Polling state. This function enabled the robot to find objects even if they were placed behind it, since the robot would eventually make a full 360 degree turn in looking for it. We chose to turn the robot by 30 degree increments so as to not miss any objects but also to keep the navigation efficient. We tested turning the robot by 45 degree increments, but this modification caused the robot to miss object when it was further away from it.
Moving Towards Object
In the moveToTarget() method, the robot first calls the findBall() method which searches for the object. If the object is no longer in the robot’s view, then the findBall() method returns 1000 and causes the robot to move back to the Polling state.
If the object is in the robot’s view and returns a very large radius of over 175, then we deduce that the object is very close to the robot. We determined this assumption through experimentation. In testing our image detection, we also noticed that the Pi Camera would often lose objects that were too close to it. When an object encapsulated the entire camera’s vision, the camera often was not able to detect its color. What led us to look into this matter was our observation that the robot would often navigate perfectly towards the object but then simply pass by it. Hence, we realized that the Pi Camera was unreliable when the robot was about two to three feet away from the object, and we introduced the Move Until Lost state for this reason. When the findBall() method detects an object of a radius of over 175, the robot moves to the Move Until Lost state, and this addition solved the issue of the robot moving past the object after navigating towards it in a seemingly perfect manner. At the Moving Towards Object state, the distance sensor may also cause the robot to move into the Move Until Lost state by detecting the object and therefore signaling that the robot is approximately a foot and a half away from it.
If the findBall() method does not return 900 or 1000, then it returns the x-coordinate of the object. Our window was set to a width of 640 pixels, so the x-coordinate had to be between 0 and 640. We defined three sections within this window and used them to determine which direction to move the robot. If the x-coordinate was less than 160, then the object was to the left of the robot so the robot veered left. If the x-coordinate was greater than 480, then the object was to the right of the robot so the robot veered right. Otherwise, the x-coordinate was between 160 and 480 and thus the object was relatively straight ahead of the robot. In this case, the robot moves straight forward. We did not use any scientific formulas to define these three sections. Rather, we based it off of intuition that as long as the object was in the middle half of the Pi Camera’s vision, the robot should continue to move straight ahead, and this worked very well in keeping the robot on track towards the object.
Move Until Lost
In this state, the robot knows that it is within two to three feet of the object. This state’s objective is to keep the robot moving towards the object until the Pi Camera no longer detects the object or the distance sensor indicates that the robot is within a foot and a half of the object. This conservative approach ensures that the robot will not miss the object and move past it. It does, however, mean that our robot does not go directly up to and touch the object but rather stops about a foot and a half away from it.
The robot will continue to move towards the object in the same exact fashion as it does in the Moving Towards Object state until the Pi Camera ceases to detect the object or the distance sensor detects an object in front of it. When either of those two events occur, the robot moves to the Done state.
Done
The robot is located within a foot and a half of the object. It stops and blinks an LED for 5 seconds. If it is currently at the blue object, then it moves back to the Polling State with the objective of finding the green object. Otherwise, if it is at the green object, it simply waits for its next command.
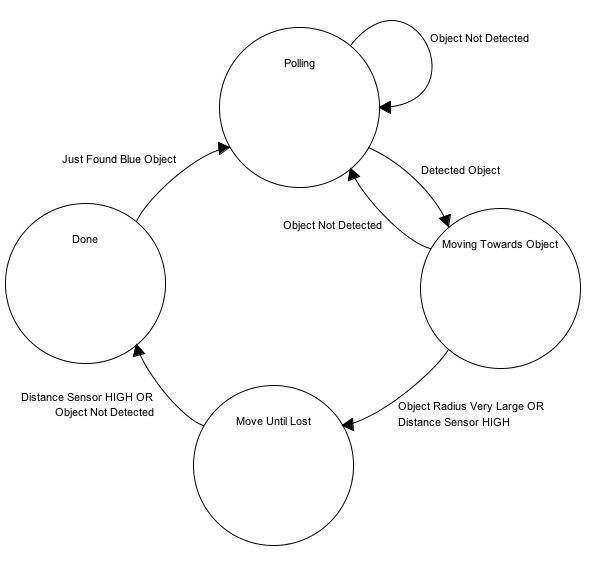
This state machine is shown in the diagram below:
Figure 4: Robot Navigation Finite State Machine
Servos
We used the rpi.GPIO library to control the servos. We chose this library primarily because we had already experimented with this library in a previous lab assignment, so we felt comfortable with its functionalities and uses. It also proved to be sufficient for the task of transporting the robot towards an object. However, the robot did not move as smoothly or as quickly as we may have liked and we concede that an alternative library such as pi-GPIO may have yielded more optimal results. Although we did do our research and looked into using different GPIO libraries, we decided that, given our time constraint, we needed to prioritize detecting the object and navigating our robot towards it before we began to optimize the process.
Using the rpi.GPIO library, we created two PWM instances using the GPIO.PWM(channel, frequency) method, one for each servo. We set the frequency equal to 50 Hz and set the channel equal to the pin number corresponding to the servo. We found that a duty cycle of approximately 6.3 resulted in the fastest clockwise direction and that a duty cycle of approximately 7.8 resulted in the fasted counterclockwise direction. We used this information to write helper methods that move the robot forward and backward and turn the robot right or left.