ECE5725 Project: Parking Lot
Really Awesome
A Project By Xinyu Wu & Shiqi Li.
Demonstration Video
Introduction
Today, vehicles are widely used and parking a car becomes an inevitable problem. One situation people may encounter is that a car needs to park in a designated parking spot, for example, a private parking spot marked with a license plate number, and drivers can easily forget where their parking slots are. This project aims to design a robot car that can recognize license plate numbers in a parking lot and back itself into the corresponding location with its license plate number. In our parking lot, license plate numbers are composed of letters and numbers which simulate the real-world situation. In this project, the robot was placed at a starting line to detect the right parking spot. We used the RPi to control the movement of the robot. The car was controlled to start finding the parking slot by pressing the button GPIO 17 on the piTFT manually. We also implemented the function that the robot can direct itself into the parking slot autonomously. We designed a program on the RPi so that the robot could memorize a randomly generated input license plate number from a license plate list which contained three license plate numbers and it compared the generated license plate number with detected numbers. A Picamera attached to the RPi on the right side of the car was used to detect license plate numbers in the parking lot. We developed an image processing algorithm to process the image captured and to recognize and compare the specific license plate number. The captured real-time picture could be projected on the piTFT for the convenience of observation. If it detects the right parking spot, the robot will turn right at an angle of 90 degrees and park itself into the spot.
Project Objective:
- The car is autonomous with a physical start button and a physical quit button.
- The car’s license plate number is randomly generated by the program.
- The Pi camera attached to the robot can detect the license plate number at each parking spot and compared with the input license plate number.
- The robot can move along the road and park itself in front of the right license plate with implemented control program.
- The captured real-time images and both the target and the detected license plate numbers can be projected on the piTFT for the convenience of observation.
Design and Testing
Assemble the robot car referring to Lab3
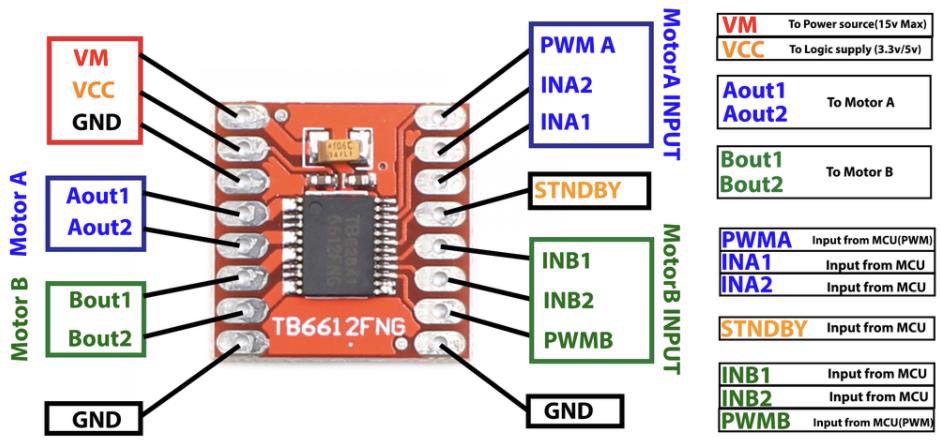
Figure 1. Motor Controller
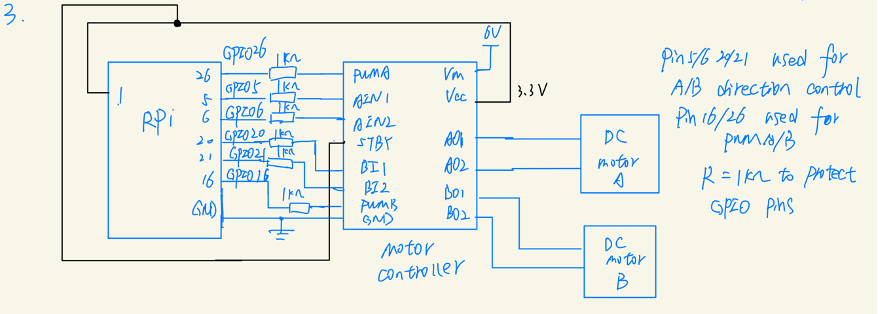
Figure 2. Circuit Schematic
The first figure shows the connections for the motor controller. The second diagram is a circuit connection diagram and from Lab3. We referred to the diagram and reassembled our robot car. To drive the dc motors, we needed a Sparkfun TB6612FNG dual-channel motor controller which was connected to the RPi and dc motors. Here, RPi was powered with 5V, the motor controller was powered with 3.3V by RPi, and the dc motor was powered with 6V. 1K resistors were used in the circuit to protect GPIO pins.
We aimed to install OpenCV on the RPi Linux system based on the Lab4’s kernel system which was 5.10.25 Preempt RT version. We followed the process given on Canvas and used the command sudo apt-get install libopencv-dev python-opencv to install OpenCV. Then we tried to install the Picamera module. The camera module ribbon cable was inserted into the camera port on the RPi. One thing worth noting was that the connectors at the bottom of the ribbon cable were facing the contacts in the port. Our camera ribbon cable was broken down due to some contact problem and we replaced it by a new one during the testing process at the later stage of our project. After inserting the camera module, we configured the RPi by enabling the camera module in Interfaces in the RPI configuration window. When rebooting completed, we tested our camera module by using the command:
raspistill -o Desktop/image.jpg
The captured file was saved as “image.jpg”. We tested the camera which turned out to be
normally functioning by using the above command and checking the saved image.
During the installation of OpenCV, we encountered a problem. The original version of python on the kernel system we used was 2.0+ while one tool needed to recognize characters required python 3.0+. Thus, we updated the version of Python and when we tried to run “sudo apt-get upgrade” to install available upgrades of all packages currently installed on the system, the upgrade process kept running and we mistakenly killed the process, which resulted in the system breaking down. Fortunately, we have backed up the system, and we simply recover the system from the previous backup file.
To update the Python version, we issued the command to install python3.6 version:
Sudo apt-get install python3.6
Next, we followed the instructions on Canvas to install OpenCV on Python 3.6.
pip3 install opencv-contrib-python==3.4.6.27 -i
sudo apt-get update #setup of dependencies
sudo apt-get install libhdf5-dev
sudo apt-get install libatlas-base-dev
sudo apt-get install libjasper-dev
sudo apt-get install libqt4-test
sudo apt-get install libqtgui4
sudo apt-get update
When using the command
pip3 install opencv-contrib-python==3.4.6.27 -i
to install opencv, the installed package “cv2” can only be run without the “sudo” command. To fix this problem, we added “sudo” to install opencv and “cv2” can be imported when using “sudo python3”.
In addition, we kept receiving error messages concerning the unmet dependencies even though we added “sudo” in each command. After trying abundant methods, we fixed the problem by adding “-t buster” to the end of a command when using sudo apt-get install [package]. For example, when issuing the command
sudo apt-get update #setup of dependencies
We should use
sudo apt-get install libhdf5-dev -t buster
In this way, all the required dependencies could be resolved automatically rather than being manually downloaded one by one.
Another problem we encountered was the version of “pip” which used to be 2.7 and was incompatible with the pytesseract package. We solved this problem by using
python3 -m pip install pytesseract
We developed an image processing algorithm to capture and process images. Our license plate numbers are composed of both letters and numbers. Thus, we made three license plates and printed them out.
At first, we tried to process the original images by issuing a command involving pytesseract. The results derived turned out to be highly inaccurate. Sometimes there were no results after using pytesseract or there were unrecognized characters in the results. Therefore, we decided to develop an image preprocessing algorithm.
First, we used Picamera to capture a picture and save as image.jpg. We imported picamera library to get the picture. Images can be taken by using:
from picamera import PiCamera
from time import sleep
camera = PiCamera()
camera.start_preview()
time.sleep(0.2)
camera.capture('image.jpg')
camera.stop_preview()
Note If your preview is upside-down, you can rotate it by 180 degrees with the following code:
camera.rotation = 180The original picture is shown as follows:
Then we process the image for further character recognition including characters localization, background deletion, noise reduction, and characters enhancement.
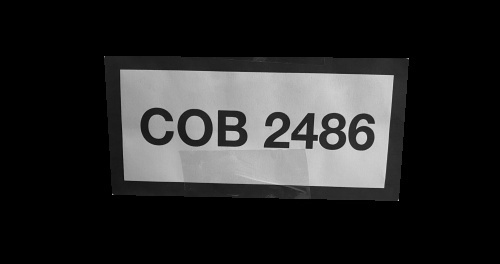
First, we preprocessed the initial image and localized the characters by splitting the black rectangular area and removing the background area. This improves the accuracy of character recognition. The processed image is saved as "preprocess.jpg".
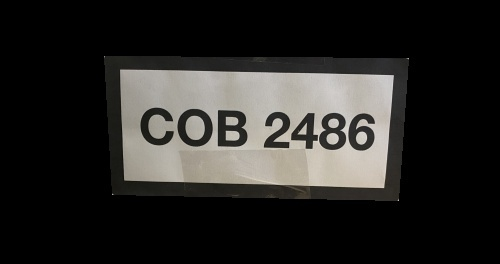
Figure 4. Preprocessed image to split the black rectangular region
Then read the preprocess.img with the following code:
img = cv2.imread("preprocess.jpg")Convert the image to a grayscaled image with the following code:
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
Use Morphological Transformations to maximize contrast with the following code:
structuringElement = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3))
imgTopHat = cv2.morphologyEx(img_gray, cv2.MORPH_TOPHAT, structuringElement)
imgBlackHat = cv2.morphologyEx(img_gray, cv2.MORPH_BLACKHAT, structuringElement)
Use findContours function to find the contours of characters:
binary, contours, hierarchy = cv2.findContours(
img_thresh,
cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE
)
Note: In OpenCV 3.x this function needs to return 3 values which is different from the OpenCV 2.x version.
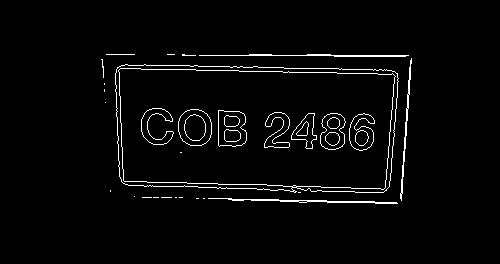
Draw contours using drawContours function:
# black temp pic
temp_result = np.zeros((height, width, channel), dtype=np.uint8)
# draw contours
cv2.drawContours(temp_result, contours=contours, contourIdx=-1, color=(255, 255, 255))
Visualize possible contours of characters:
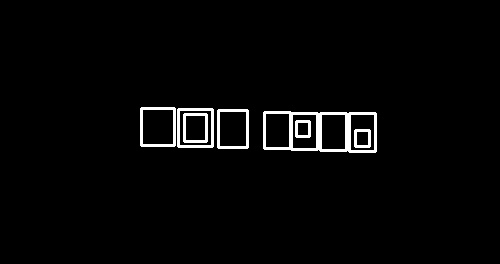
Splitting character areas using getRectSubPix( ):
img_cropped = cv2.getRectSubPix(
img_rotated,
patchSize=(int(plate_width), int(plate_height)),
center=(int(plate_cx), int(plate_cy))
)
Crop characters to derive the following picture:

Finally, make the characters bigger with copyMakeBorder() function to generate the picture result and save it as "result.jpg":
img_result = cv2.copyMakeBorder(img_result, top=10, bottom=10, left=10, right=10,
borderType=cv2.BORDER_CONSTANT, value=(0, 0, 0))
Here is the generated final result:

Perform license plate recognition
Use tesseract engine to recognize the characters by running:
tesseract result.jpg file -l eng -psm 7
The detection results are saved in the "file.txt".
We got the detection results by reading this file with the following codes:
# detect the license plate from the streaming picture
f = open("file.txt", "r")
text = f.readline()
text = text.replace("\n", "")
f.close()
Then by comparing the results and target license plate, we can know whether the robot should move forward or stop here.
Design the car control algorithms
We utilized PWM to control the left and right motors. A PWM instance can be created using p = GPIO.PWM(26, frequency) and can be started using p.start(dutycycle). To change the duty cycle of a pulse width modulation signal, we use pa.ChangeDutyCycle(dc). Since our robot car moves slowly in order to capture images and detect during the movement, the dutycycle was set to be about 70. To ensure the car moves in a straight line and to avoid inconsistency in speeds of two motors, we adjusted the two duty cycles to be different. When the car needs to turn right to park in front of the right license plate, the left motor moves forward while the right motor moves backward.
Flow Chart
Here are three flow charts describing image processing and car control algorithms.
This flow chart describes the whole picture of the software control algorithm including both image processing and car control.
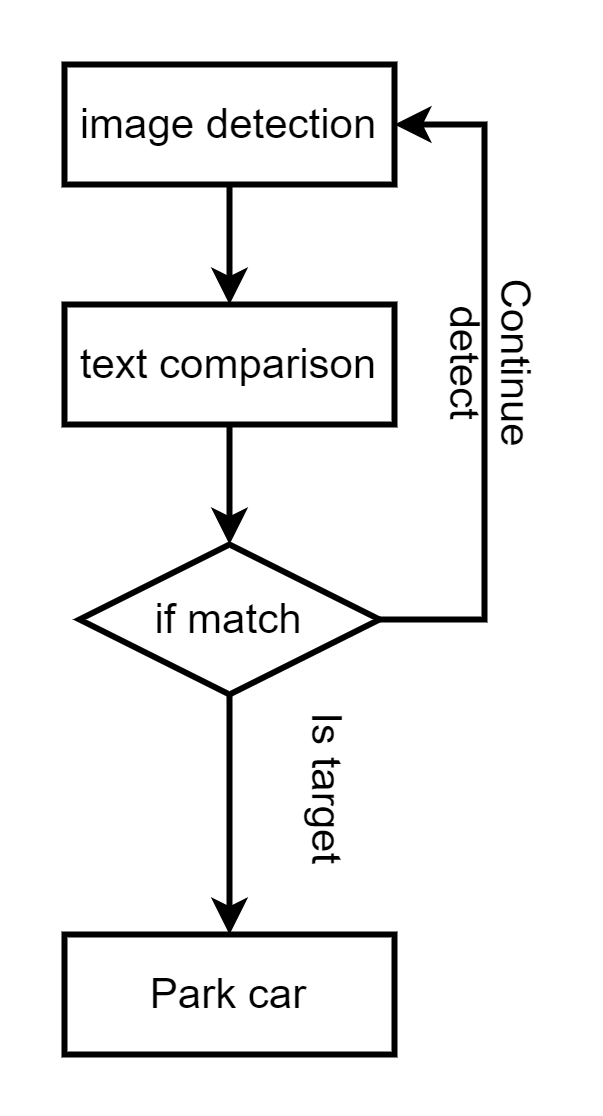
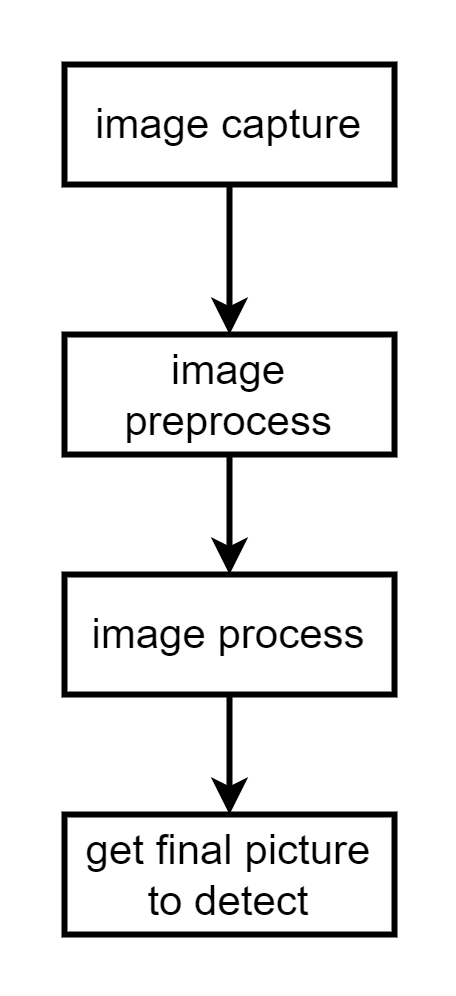
The following flow chart describes the image processing algorithm.
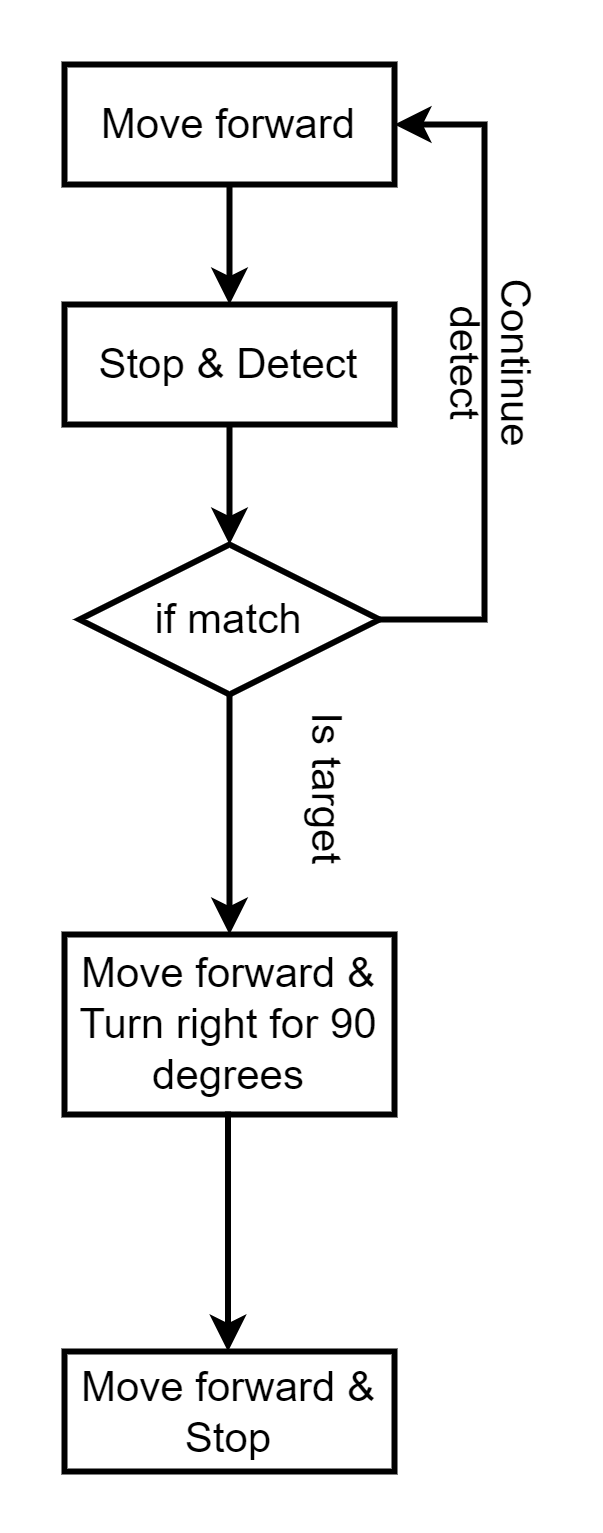
The following flow chart describes the car control algorithm.
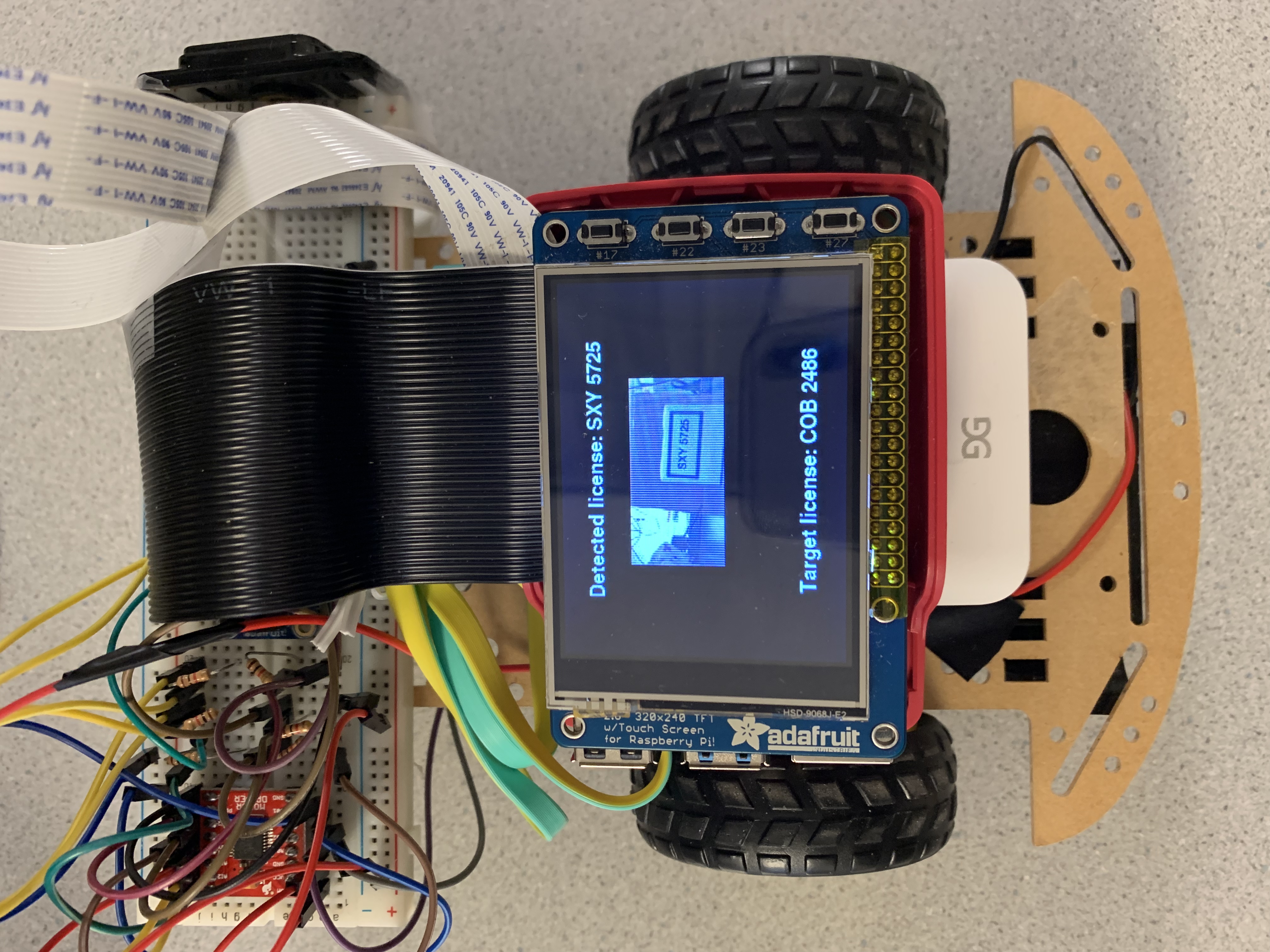
Result
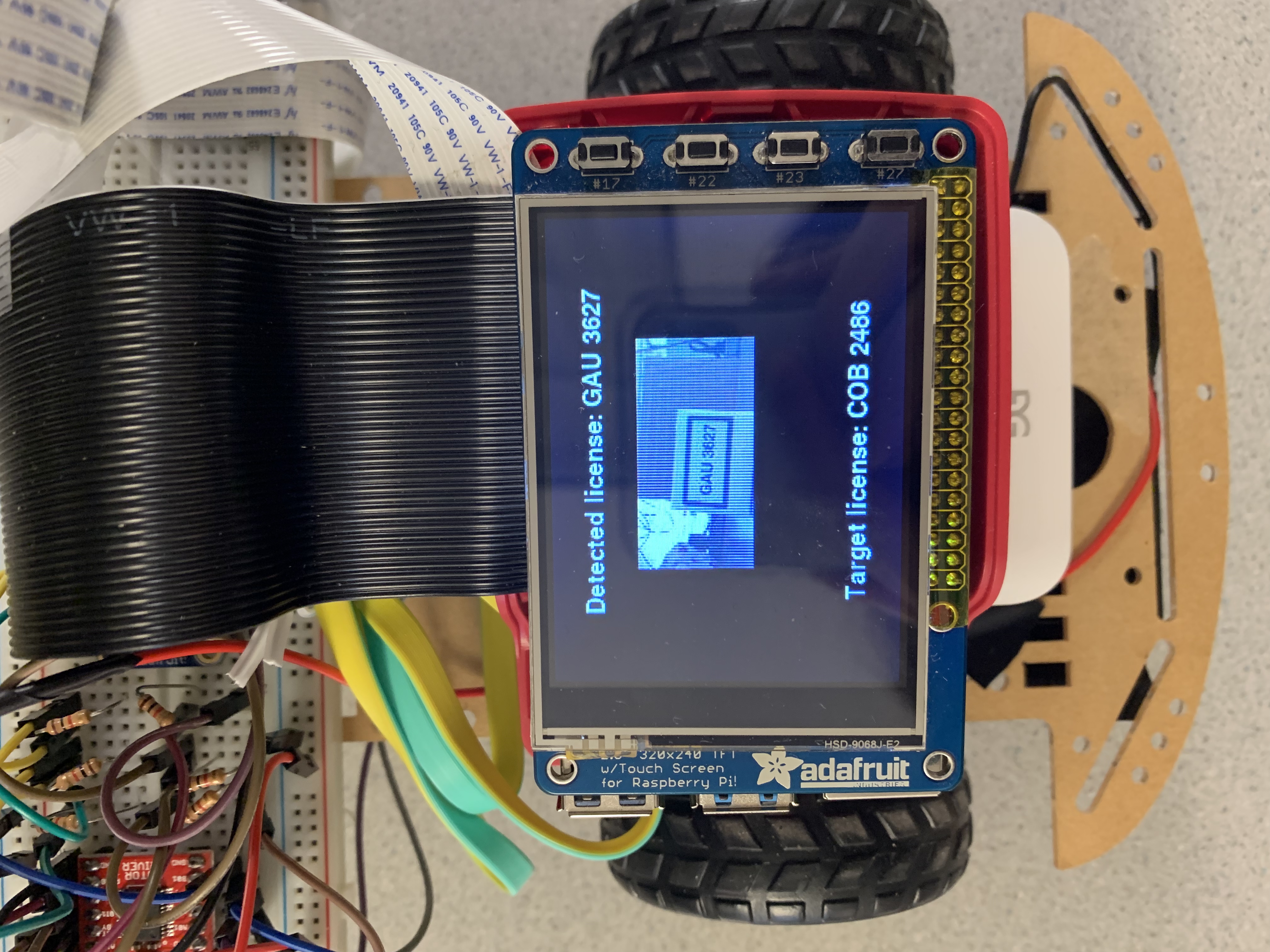
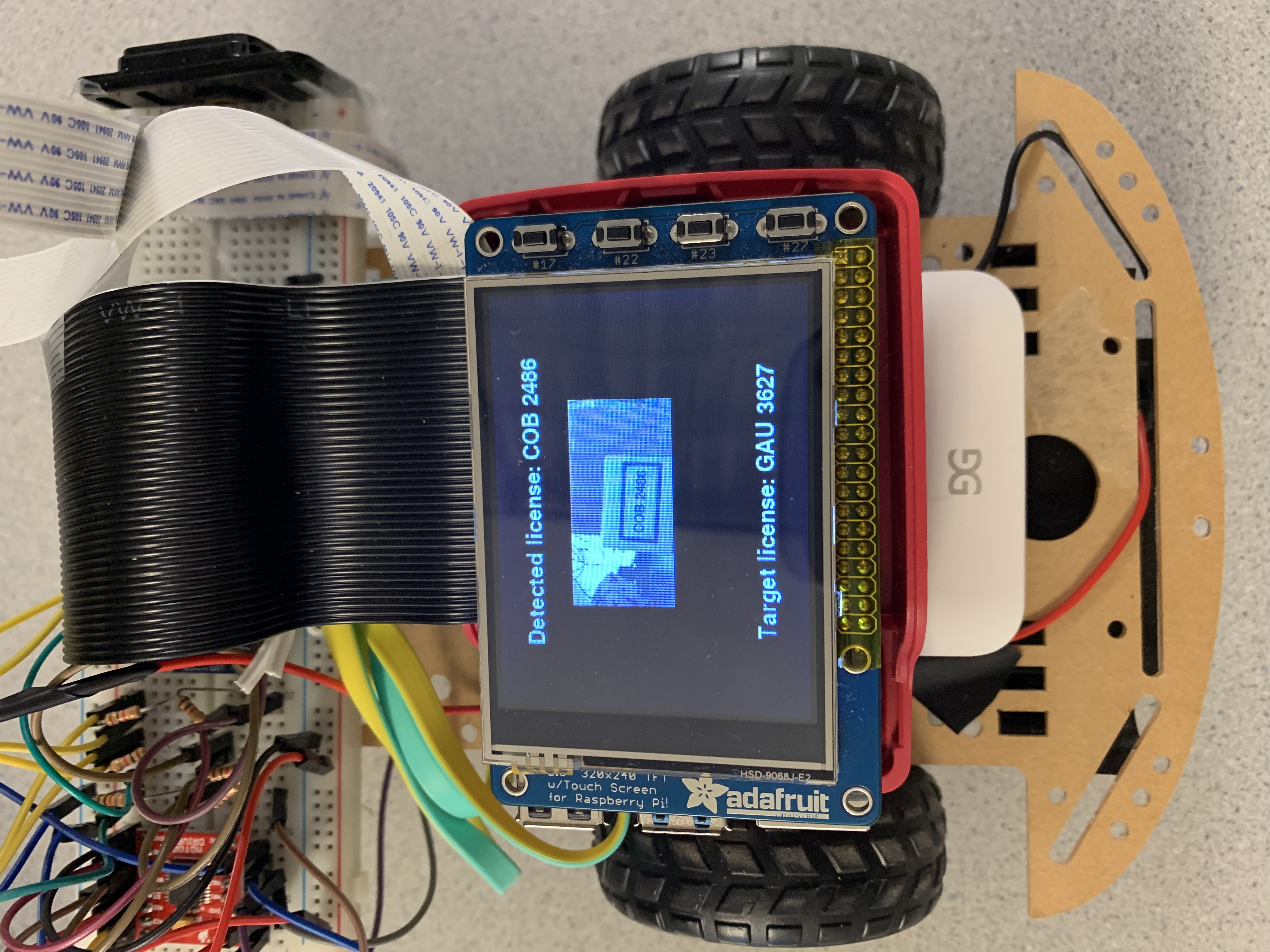
We eventually reached the goal of our project. In the software part, our robot car could successfully capture images using the Picamera. The car would take pictures each time it drives forward for a distance and stops. When a picture is taken, the program starts to process the taken images. A preprocessing algorithm is applied before the RPi begins to recognize the characters in pictures. After preprocessing images, characters will appear to be more clear and easy to be recognized by using pytesseract. The results recognized will be output to a file and can be read by the program. The recognized license plate number will also be printed on the piTFT screen, together with the original captured image and the target license plate number. The following three pictures show three kinds of situations where three license plates are detected and shown on the piTFT. The robot compares the target license plate number with the recognized characters and sees whether there is a match. If the target matches the derived texts, the robot will direct itself into the location in front of the corresponding license plate number. The program ends when the right license plate is detected, even though there are still license plates not being detected. Otherwise, the robot car moves forward and continues detecting until the right license plate is found.
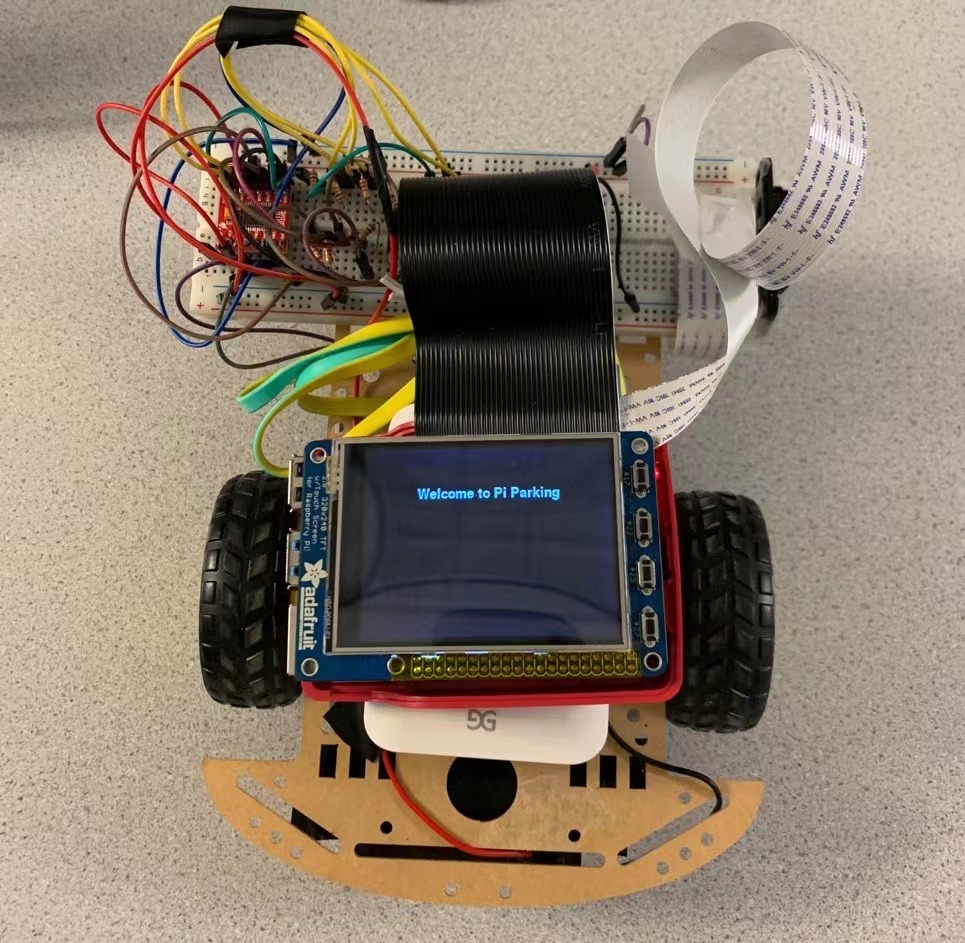
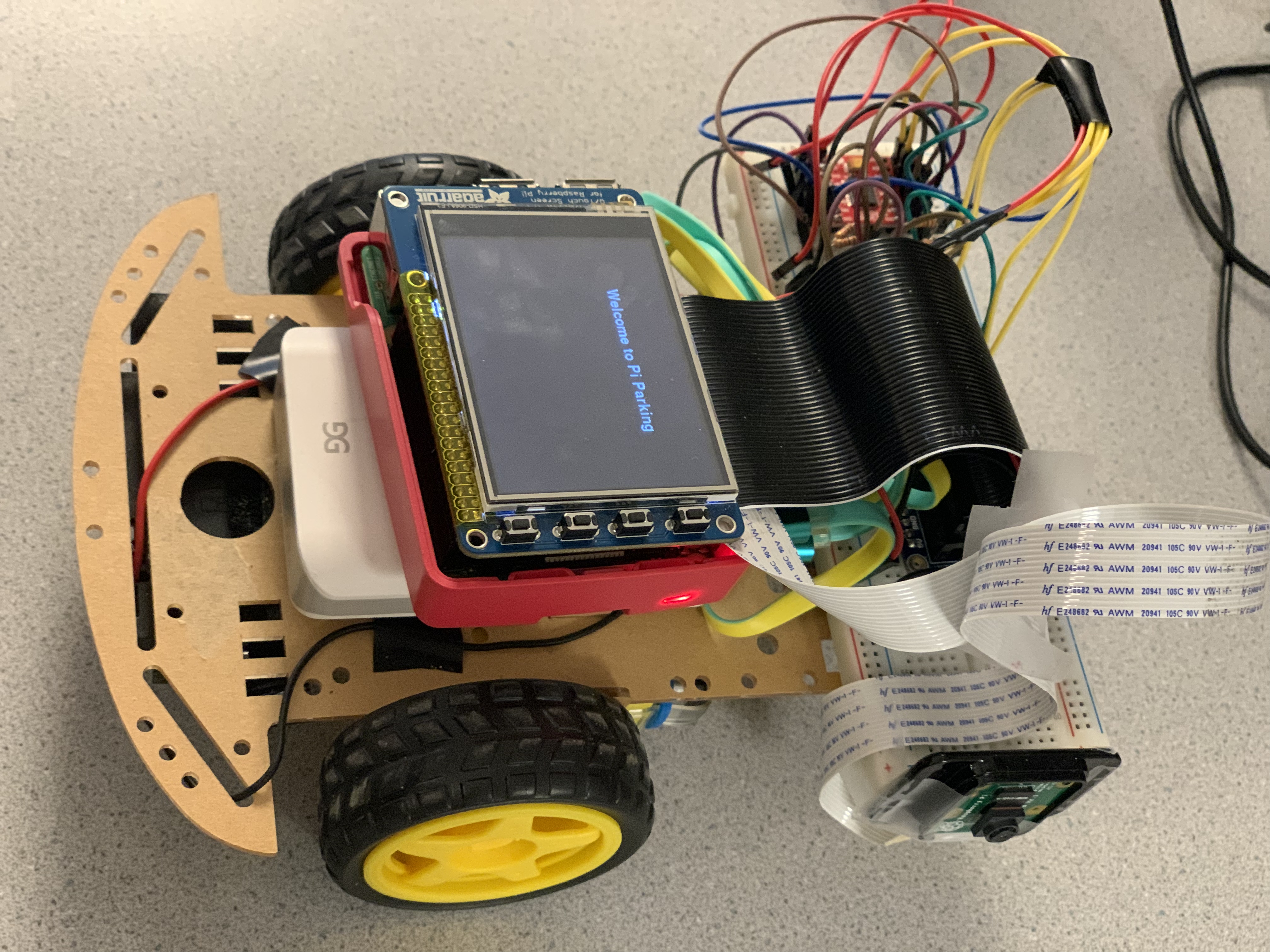
In the hardware part, the robot car is initialized with the text “Welcome to Pi Parking '' shown on the piTFT screen. The program starts with the physical button being pressed, which in our case is GPIO 17 on the piTFT. Then a target license plate is generated from a list of three picked license plates by using choice() function from “random” library. The car slowly moves straight forward and stops to capture an image. If the right license plate is detected, the car turns right and parks itself in front of the corresponding license plate. If not, the car moves forward and repeats to detect until the right position is found.
Conclusion and Future Work
We designed and tested a parking lot with an autonomous robot car. We successfully reached our goals by developing image processing and car control algorithms in software using OpenCV and PWM signals. We also set up a parking lot and constructed our own robot car. To detect images using the camera, we installed the camera on the right side of the car so that the car could detect during its movement. For the future work, we could consider develop a closed-loop control algorithm to give the car some feedbacks regarding its movement so that the car would move forward in a straight line more easily without adjusting the parameters in our code. Another possible future work would be to develop a parking algorithm with some sensors so that the car would park in a specific slot more accurately.
Work Distribution
Project group picture

Xinyu Wu
xw586@cornell.edu
Designed the image processing algorithm and tested the overall system.

Shiqi Li
sl2454@cornell.edu
Designed the display and car control algorithm and tested the overall system.
Parts List
- Raspberry Pi $35.00
- Motor Driver TB6612FNG $4.95
- Wheel robot platform $24.99
- Raspberry Pi Camera V2 $25.00
Total: $0 (Provided from lab)
References
PiCamera DocumentTower Pro Servo Datasheet
Bootstrap
Pigpio Library
R-Pi GPIO Document
Pi Camera
The project from previous ECE 5725 students
Image Processing in OpenCV
# Opencv import cv2 import numpy as np from picamera import PiCamera # import pytesseract from random import choice # car control import time import RPi.GPIO as GPIO import sys, pygame from pygame.locals import * import os from PIL import Image # run cmd import subprocess # ======================= GPIO pygame Initialize =========================== os.putenv('SDL_VIDEODRIVER', 'fbcon') # Display on piTFT os.putenv('SDL_FBDEV', '/dev/fb0') # os.putenv('SDL_MOUSEDRV', 'TSLIB') # Track mouse clicks on piTFT os.putenv('SDL_MOUSEDEV', '/dev/input/touchscreen') GPIO.setmode(GPIO.BCM) # Set for broadcom numbering not board numbers... # PWM control GPIO.setup(26, GPIO.OUT) # set GPIO 26 as PWMA GPIO.setup(16, GPIO.OUT) # set GPIO 16 as PWMB # direction control GPIO.setup(5, GPIO.OUT) # set GPIO 5 as AIN1 GPIO.setup(6, GPIO.OUT) # set GPIO 6 as AIN2 GPIO.setup(20, GPIO.OUT) # set GPIO 20 as BIN1 GPIO.setup(21, GPIO.OUT) # set GPIO 20 as BIN1 # button control GPIO.setup(17, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(22, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(23, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(27, GPIO.IN, pull_up_down=GPIO.PUD_UP) # colors WHITE = (255, 255, 255) RED = (255, 0, 0) GREEN = (0, 255, 0) BLACK = (0, 0, 0) size = width, height = 320, 240 # pygame initialize pygame.init() pygame.mouse.set_visible(False) screen = pygame.display.set_mode((320, 240)) # screen layout my_font = pygame.font.Font(None, 25) # ============================== Car Control ================================== fa = 50 fb = 50 dca = 0 dcb = 0 # To create a PWM instance: pa = GPIO.PWM(26, fa) pb = GPIO.PWM(16, fb) # To start PWM: pa.start(dca) # where dc is the duty cycle (0.0 <= dc <= 100.0) pb.start(dcb) def control_servo(serv_num, direction, dc): # Motor A if serv_num == "left": # CW if direction == 'cw': GPIO.output(5, GPIO.HIGH) GPIO.output(6, GPIO.LOW) pa.ChangeDutyCycle(dc) if direction == 'ccw': GPIO.output(5, GPIO.LOW) GPIO.output(6, GPIO.HIGH) pa.ChangeDutyCycle(100) if direction == 'stop': pa.ChangeDutyCycle(0) if serv_num == "right": if direction == 'cw': GPIO.output(20, GPIO.HIGH) GPIO.output(21, GPIO.LOW) pb.ChangeDutyCycle(dc) if direction == 'ccw': GPIO.output(20, GPIO.LOW) GPIO.output(21, GPIO.HIGH) pb.ChangeDutyCycle(dc) if direction == 'stop': pb.ChangeDutyCycle(0) # detecting if text equals to the target texts match = False def car_control(iftext): ''' iftext: detecting if text equals to target if equals car turn around into the position else moving forward ''' if iftext: # if match target license, turn right # go straight control_servo("left", 'cw', 65) control_servo("right", 'ccw', 73) time.sleep(1) # turn right control_servo("left", 'cw', 90) control_servo("right", 'cw', 96) time.sleep(0.75) # move forward control_servo("left", 'cw', 65) control_servo("right", 'ccw', 73) time.sleep(1.7) # continue to turn right #control_servo("left", 'cw', 90) #control_servo("right", 'cw', 96) #time.sleep(0.15) control_servo("left", 'stop', 0) control_servo("right", 'stop', 0) # else: # control_servo("left", 'stop') # control_servo("right", 'stop') def image_resize(filename): baselen = 160 image = Image.open(filename) w, h = image.size if w <= baselen and h <= baselen: print(filename, 'is in proper size.') return if (1.0 * w / baselen) > (1.0 * h / baselen): scale = 1.0 * w / baselen new_im = image.resize((int(w / scale), int(h / scale)), Image.ANTIALIAS) else: scale = 1.0 * h / baselen new_im = image.resize((int(w / scale), int(h / scale)), Image.ANTIALIAS) new_im.save('show.jpg') new_im.close() # show the detected license number and target number def display_screen(text, target_text): screen.fill(BLACK) # Black Screen # Detected text detect_txt = "Detected license: " + text detect_surface = my_font.render(detect_txt, True, WHITE) detect_rect = detect_surface.get_rect(center=(160, 30)) screen.blit(detect_surface, detect_rect) # Target text target_txt = "Target license: " + target_text target_surface = my_font.render(target_txt, True, WHITE) target_rect = target_surface.get_rect(center=(160, 210)) screen.blit(target_surface, target_rect) # image display image_resize('display.jpg') # im_display = pygame.image.load("display.jpg") im_display = pygame.image.load('show.jpg') img_rect = im_display.get_rect() img_rect.right = 240 img_rect.top = 60 screen.blit(im_display, img_rect) pygame.display.flip() # display on actual screen # ==============================Image Process Function===================================== camera = PiCamera() # get PiCamera picture def imageCap(): camera.resolution = (2592, 1944) camera.framerate = 15 camera.start_preview() camera.brightness = 65 camera.rotation = 0 time.sleep(0.2) camera.capture('image.jpg') camera.stop_preview() def imageProcess(): ''' number plate localization and background delete turn into binary image input: image.ipg from piCamera return: result.jpg ''' # global start_time # start_time = time.time() # Reading Image # im = Image.open("image.jpg") # angle = 180 # out = im.rotate(angle,expand=True) # out.save("image.jpg") ori_img = cv2.imread("image.jpg") img = ori_img[900:1600, 600:2000] # can be restrict to smaller region cv2.imwrite('display.jpg', img) # image shape height, width, channel = img.shape # converge image to grayscale # hsv = cv2.cvtColor(img_ori, cv2.COLOR_BGR2HSV) # gray = hsv[:,:,2] img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # Maximize Contrast structuringElement = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)) imgTopHat = cv2.morphologyEx(img_gray, cv2.MORPH_TOPHAT, structuringElement) imgBlackHat = cv2.morphologyEx(img_gray, cv2.MORPH_BLACKHAT, structuringElement) imgGrayscalePlusTopHat = cv2.add(img_gray, imgTopHat) img_gray = cv2.subtract(imgGrayscalePlusTopHat, imgBlackHat) # Adaptive thresholding img_blurred = cv2.GaussianBlur(img_gray, ksize=(5, 5), sigmaX=0) img_thresh = cv2.adaptiveThreshold( img_blurred, maxValue=255.0, adaptiveMethod=cv2.ADAPTIVE_THRESH_GAUSSIAN_C, thresholdType=cv2.THRESH_BINARY_INV, blockSize=19, C=9 ) # Find Contours binary, contours, hierarchy = cv2.findContours( img_thresh, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE ) # black temp pic temp_result = np.zeros((height, width, channel), dtype=np.uint8) # draw contours cv2.drawContours(temp_result, contours=contours, contourIdx=-1, color=(255, 255, 255)) # cv2.imwrite('temp.jpg', temp_result) # Prepare data contours_dict = [] for contour in contours: x, y, w, h = cv2.boundingRect(contour) cv2.rectangle(temp_result, pt1=(x, y), pt2=(x + w, y + h), color=(255, 255, 255), thickness=2) # insert to dict contours_dict.append({ 'contour': contour, 'x': x, 'y': y, 'w': w, 'h': h, 'cx': x + (w / 2), 'cy': y + (h / 2) }) # Select Candidates by char size MIN_AREA = 80 MIN_WIDTH, MIN_HEIGHT = 2, 8 MIN_RATIO, MAX_RATIO = 0.25, 1.0 possible_contours = [] cnt = 0 for d in contours_dict: area = d['w'] * d['h'] ratio = d['w'] / d['h'] if area > MIN_AREA \ and d['w'] > MIN_WIDTH and d['h'] > MIN_HEIGHT \ and MIN_RATIO < ratio < MAX_RATIO: d['idx'] = cnt cnt += 1 possible_contours.append(d) # visualize possible contours temp_result = np.zeros((height, width, channel), dtype=np.uint8) for d in possible_contours: cv2.rectangle(temp_result, pt1=(d['x'], d['y']), pt2=(d['x'] + d['w'], d['y'] + d['h']), color=(255, 255, 255), thickness=2) # cv2.imwrite('temp2.jpg', temp_result) # Select Candidates by Arrangement of Contours MAX_DIAG_MULTIPLYER = 5 # 5 MAX_ANGLE_DIFF = 12.0 # 12.0 MAX_AREA_DIFF = 0.5 # 0.5 MAX_WIDTH_DIFF = 0.8 MAX_HEIGHT_DIFF = 0.2 MIN_N_MATCHED = 3 # 3 def find_chars(contour_list): matched_result_idx = [] for d1 in contour_list: matched_contours_idx = [] for d2 in contour_list: if d1['idx'] == d2['idx']: continue dx = abs(d1['cx'] - d2['cx']) dy = abs(d1['cy'] - d2['cy']) diagonal_length1 = np.sqrt(d1['w'] ** 2 + d1['h'] ** 2) distance = np.linalg.norm(np.array([d1['cx'], d1['cy']]) - np.array([d2['cx'], d2['cy']])) if dx == 0: angle_diff = 90 else: angle_diff = np.degrees(np.arctan(dy / dx)) area_diff = abs(d1['w'] * d1['h'] - d2['w'] * d2['h']) / (d1['w'] * d1['h']) width_diff = abs(d1['w'] - d2['w']) / d1['w'] height_diff = abs(d1['h'] - d2['h']) / d1['h'] if distance < diagonal_length1 * MAX_DIAG_MULTIPLYER \ and angle_diff < MAX_ANGLE_DIFF and area_diff < MAX_AREA_DIFF \ and width_diff < MAX_WIDTH_DIFF and height_diff < MAX_HEIGHT_DIFF: matched_contours_idx.append(d2['idx']) # append this contour matched_contours_idx.append(d1['idx']) if len(matched_contours_idx) < MIN_N_MATCHED: continue matched_result_idx.append(matched_contours_idx) unmatched_contour_idx = [] for d4 in contour_list: if d4['idx'] not in matched_contours_idx: unmatched_contour_idx.append(d4['idx']) unmatched_contour = np.take(possible_contours, unmatched_contour_idx) # recursive recursive_contour_list = find_chars(unmatched_contour) for idx in recursive_contour_list: matched_result_idx.append(idx) break return matched_result_idx result_idx = find_chars(possible_contours) matched_result = [] for idx_list in result_idx: matched_result.append(np.take(possible_contours, idx_list)) # visualize possible contours temp_result = np.zeros((height, width, channel), dtype=np.uint8) for r in matched_result: for d in r: cv2.rectangle(temp_result, pt1=(d['x'], d['y']), pt2=(d['x'] + d['w'], d['y'] + d['h']), color=(255, 255, 255), thickness=2) # Rotate Plate images PLATE_WIDTH_PADDING = 1.3 # 1.3 PLATE_HEIGHT_PADDING = 1.5 # 1.5 MIN_PLATE_RATIO = 3 MAX_PLATE_RATIO = 10 plate_imgs = [] plate_infos = [] for i, matched_chars in enumerate(matched_result): sorted_chars = sorted(matched_chars, key=lambda x: x['cx']) plate_cx = (sorted_chars[0]['cx'] + sorted_chars[-1]['cx']) / 2 plate_cy = (sorted_chars[0]['cy'] + sorted_chars[-1]['cy']) / 2 plate_width = (sorted_chars[-1]['x'] + sorted_chars[-1]['w'] - sorted_chars[0]['x']) * PLATE_WIDTH_PADDING sum_height = 0 for d in sorted_chars: sum_height += d['h'] plate_height = int(sum_height / len(sorted_chars) * PLATE_HEIGHT_PADDING) triangle_height = sorted_chars[-1]['cy'] - sorted_chars[0]['cy'] triangle_hypotenus = np.linalg.norm( np.array([sorted_chars[0]['cx'], sorted_chars[0]['cy']]) - np.array([sorted_chars[-1]['cx'], sorted_chars[-1]['cy']]) ) angle = np.degrees(np.arcsin(triangle_height / triangle_hypotenus)) rotation_matrix = cv2.getRotationMatrix2D(center=(plate_cx, plate_cy), angle=angle, scale=1.0) img_rotated = cv2.warpAffine(img_thresh, M=rotation_matrix, dsize=(width, height)) img_cropped = cv2.getRectSubPix( img_rotated, patchSize=(int(plate_width), int(plate_height)), center=(int(plate_cx), int(plate_cy)) ) if img_cropped.shape[1] / img_cropped.shape[0] < MIN_PLATE_RATIO or img_cropped.shape[1] / img_cropped.shape[ 0] < MIN_PLATE_RATIO > MAX_PLATE_RATIO: continue plate_imgs.append(img_cropped) plate_infos.append({ 'x': int(plate_cx - plate_width / 2), 'y': int(plate_cy - plate_height / 2), 'w': int(plate_width), 'h': int(plate_height) }) # cv2.imwrite('crop.jpg',img_cropped) # Another Thresholding to Find Chars Get the result longest_idx, longest_text = -1, 0 plate_chars = [] for i, plate_img in enumerate(plate_imgs): plate_img = cv2.resize(plate_img, dsize=(0, 0), fx=1.6, fy=1.6) _, plate_img = cv2.threshold(plate_img, thresh=0.0, maxval=255.0, type=cv2.THRESH_BINARY | cv2.THRESH_OTSU) # find contours again (same as above) _, contours, _ = cv2.findContours(plate_img, mode=cv2.RETR_LIST, method=cv2.CHAIN_APPROX_SIMPLE) plate_min_x, plate_min_y = plate_img.shape[1], plate_img.shape[0] plate_max_x, plate_max_y = 0, 0 for contour in contours: x, y, w, h = cv2.boundingRect(contour) area = w * h ratio = w / h if area > MIN_AREA \ and w > MIN_WIDTH and h > MIN_HEIGHT \ and MIN_RATIO < ratio < MAX_RATIO: if x < plate_min_x: plate_min_x = x if y < plate_min_y: plate_min_y = y if x + w > plate_max_x: plate_max_x = x + w if y + h > plate_max_y: plate_max_y = y + h img_result = plate_img[plate_min_y:plate_max_y, plate_min_x:plate_max_x] img_result = cv2.GaussianBlur(img_result, ksize=(3, 3), sigmaX=0) _, img_result = cv2.threshold(img_result, thresh=0.0, maxval=255.0, type=cv2.THRESH_BINARY | cv2.THRESH_OTSU) img_result = cv2.copyMakeBorder(img_result, top=10, bottom=10, left=10, right=10, borderType=cv2.BORDER_CONSTANT, value=(0, 0, 0)) cv2.imwrite('result.jpg', img_result) # chars = pytesseract.image_to_string(img_result, lang='eng', config='--psm 7') # print(chars) if __name__ == '__main__': # license plate database target = ['GAU 3627', 'COB 2486', 'SXY 5725'] # # image process and get result.jpg # imageProcess() flag = True # Sytem start time start = time.time() while flag: screen.fill(BLACK) # Black Screen time.sleep(0.2) display = "Welcome to Pi Parking" text_surface = my_font.render(display, True, WHITE) # display title of the system rect = text_surface.get_rect(center=(160, 60)) screen.blit(text_surface, rect) pygame.display.flip() # dispaly on actual screen # choose the template license randomly from the database target_text = choice(target) # press 17 start running if not GPIO.input(17): detectLicense = True detect_start = time.time() while detectLicense: # start car move forward control_servo("left", 'cw', 62) control_servo("right", 'ccw', 73) time.sleep(1) control_servo("left", 'stop', 0) control_servo("right", 'stop', 0) # get picture and save as image.jpg imageCap() # image process and get result.jpg print("image process") imageProcess() # OCR recognize # use command line to do ocr if not os.path.exists("result.jpg"): continue cmd = "tesseract result.jpg file -l eng -psm 7" # english single line print(subprocess.check_output(cmd, shell=True)) # detect the license plate from the streaming picture f = open("file.txt", "r") text = f.readline() text = text.replace("\n", "") f.close() # detect if recognized plate is target_text if text == target_text: match = True detectLicense = False # display function # show the detected license number and target number display_screen(text, target_text) car_control(match) # delete file.txt to avoid writing error dcmd = "sudo rm file.txt *.jpg" print(subprocess.check_output(dcmd, shell=True)) detect_end = time.time() if detect_end - detect_start > 50: detectLicense = False if match: flag = False end = time.time() # software ending if end - start == 120: flag = False # physical ending if not GPIO.input(27): print("Button 27 has been pressed system out") flag = False GPIO.cleanup()