Smart Trash Can
Make your life simpler and smarter
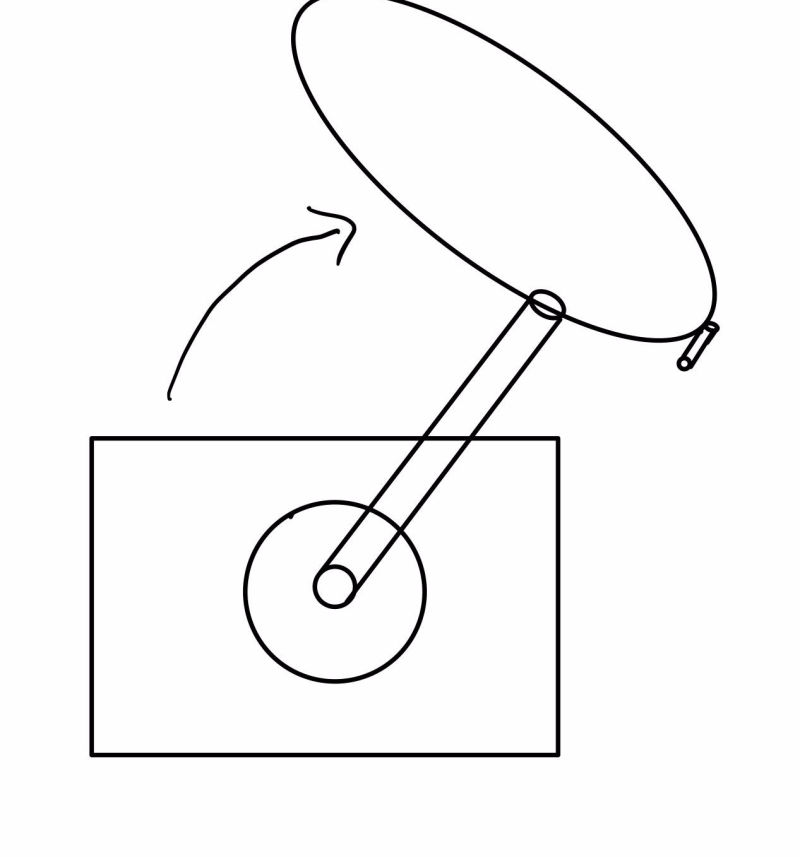
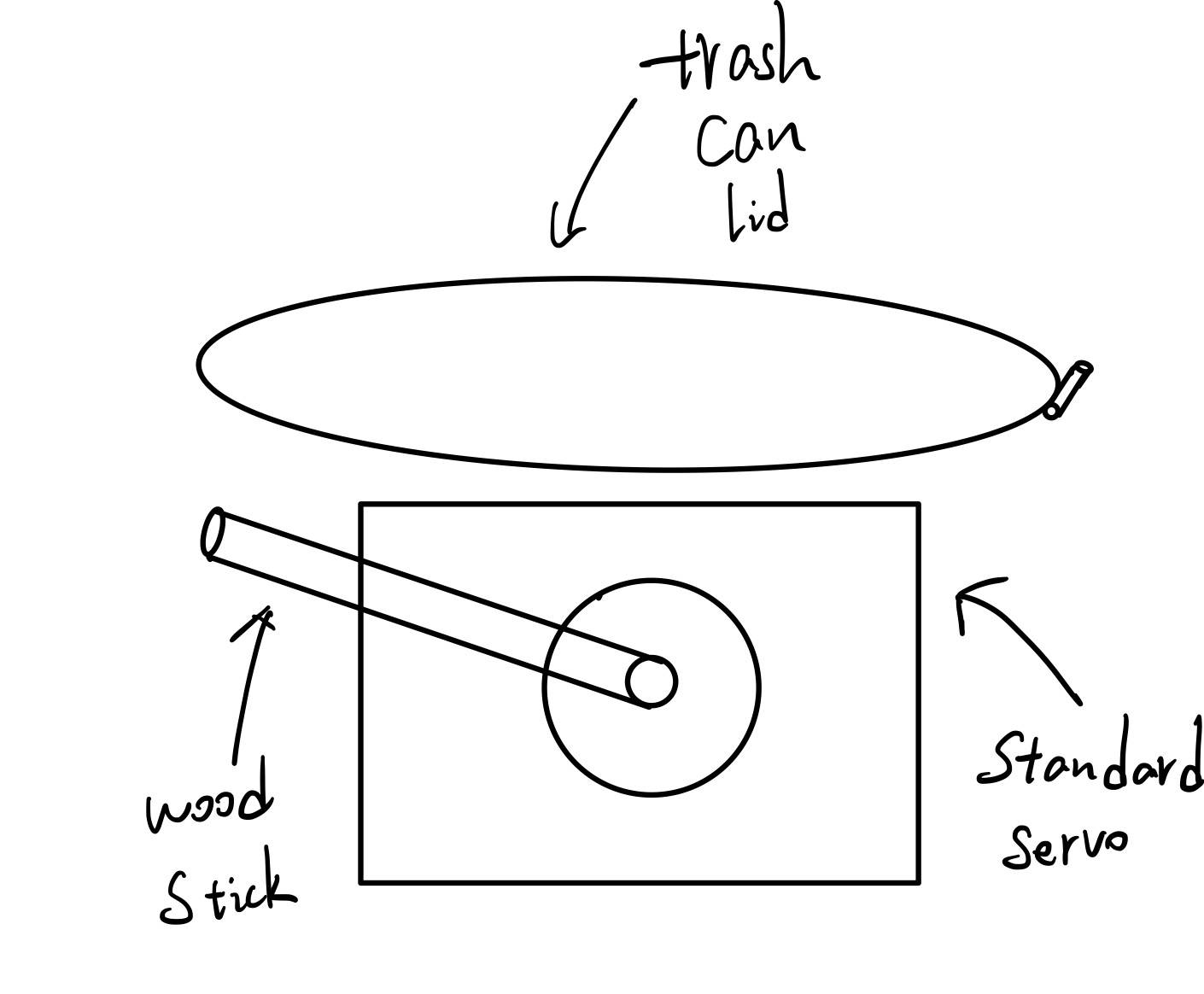
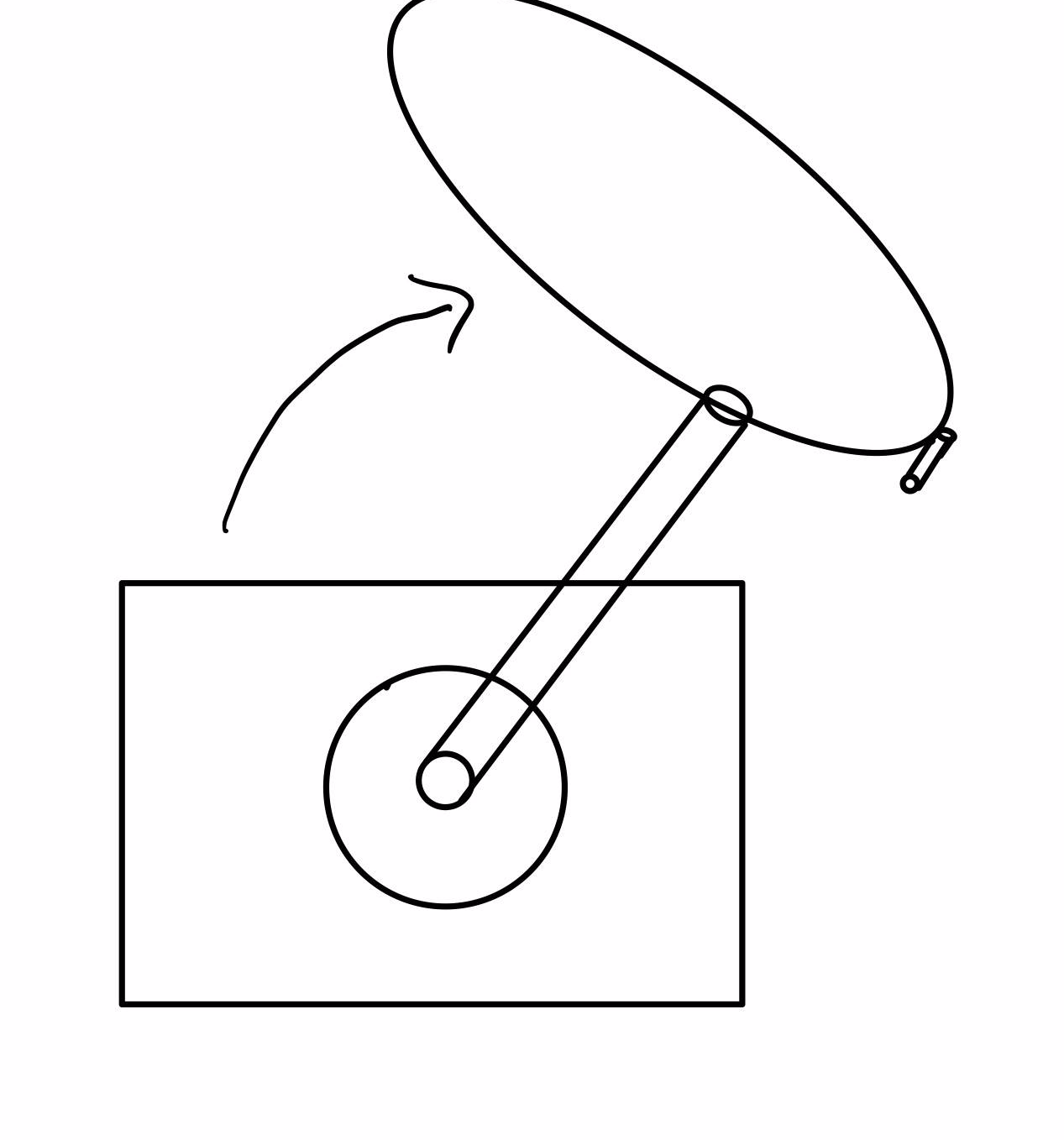
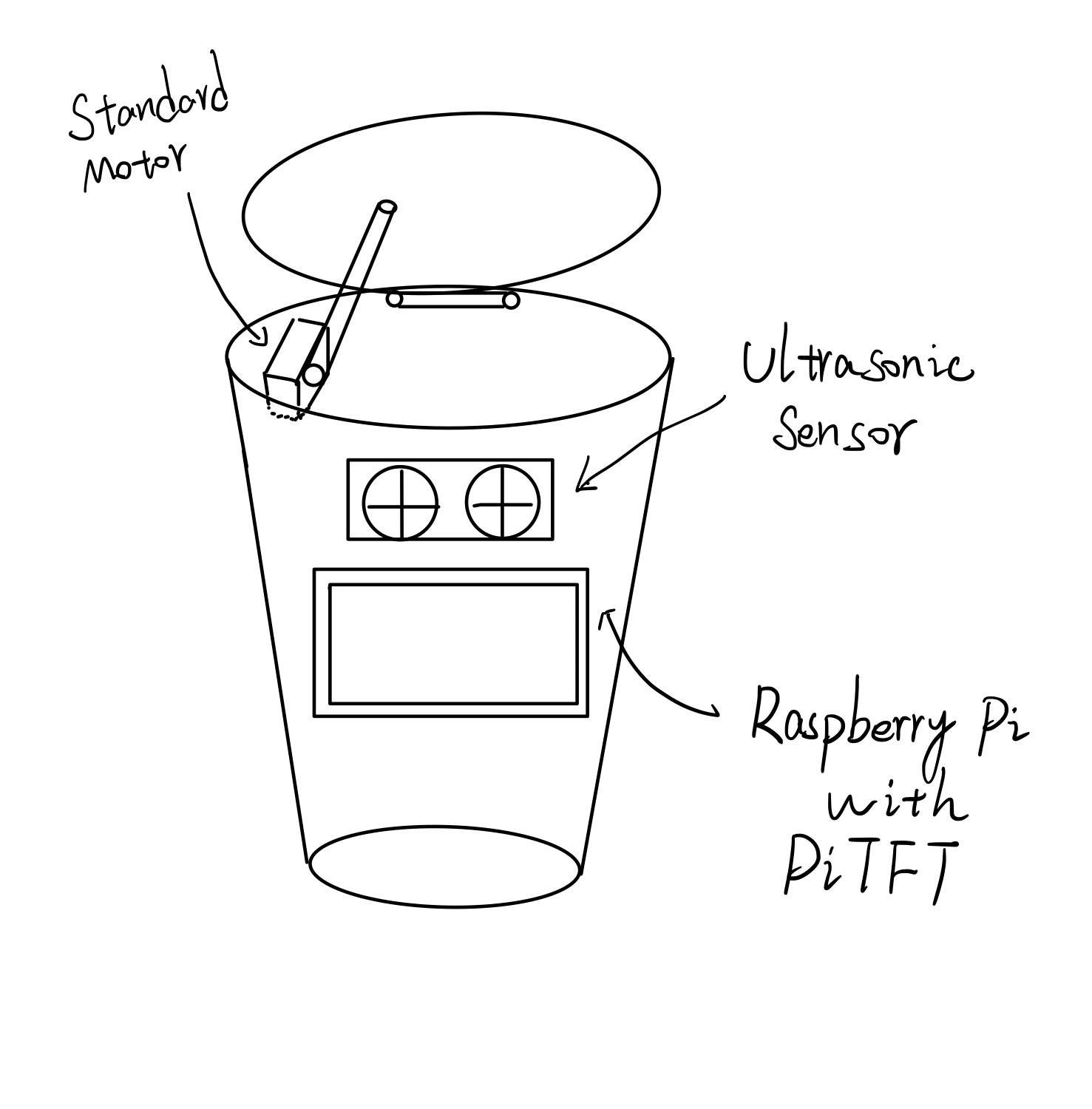
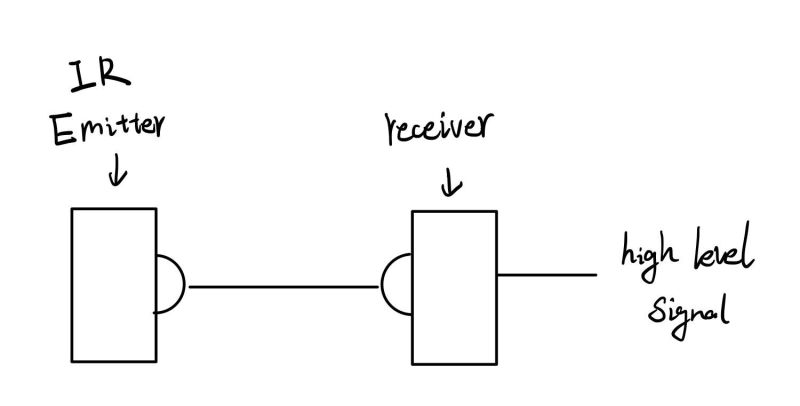
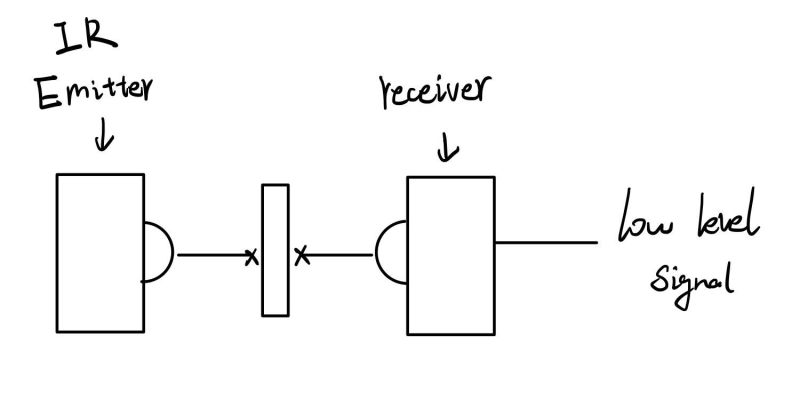
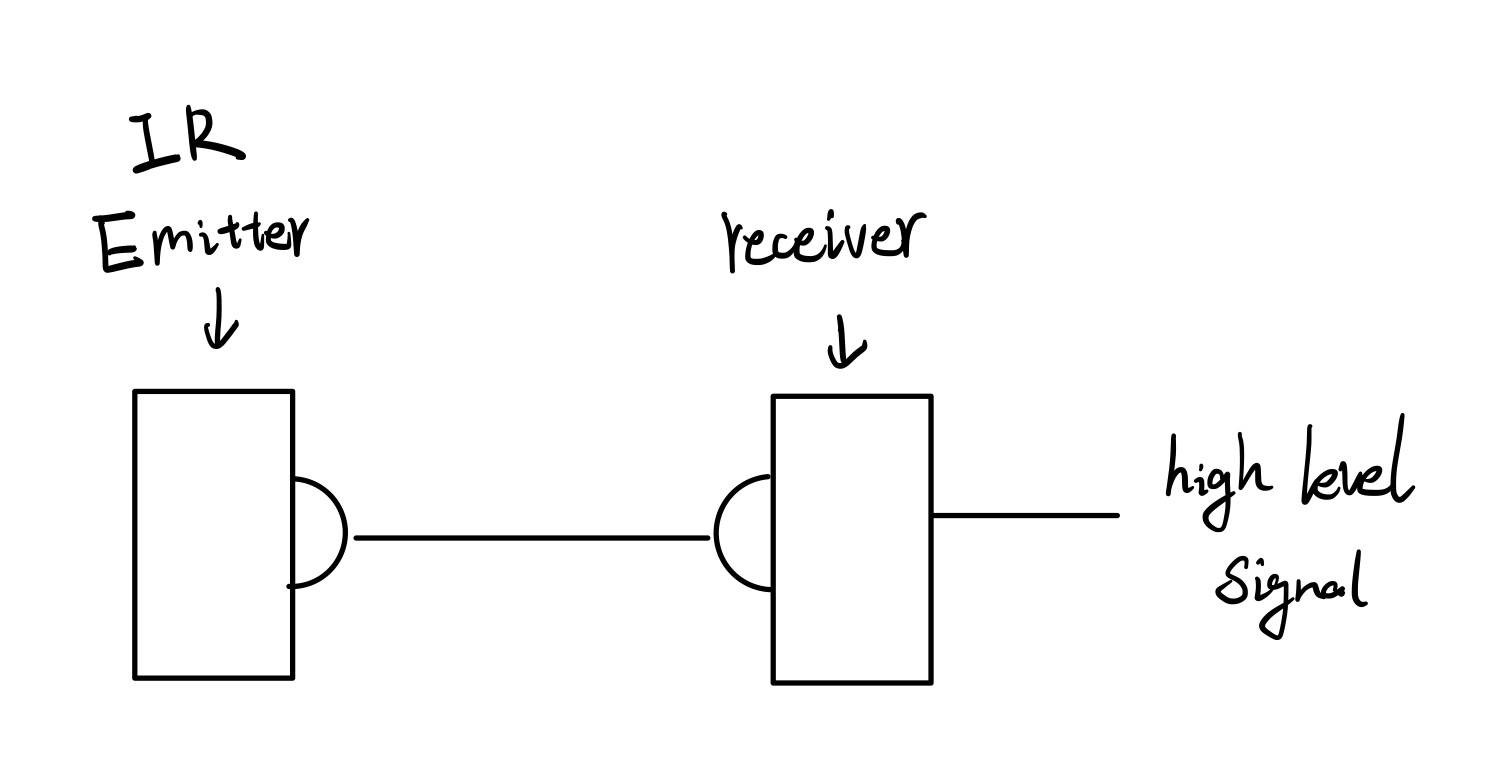
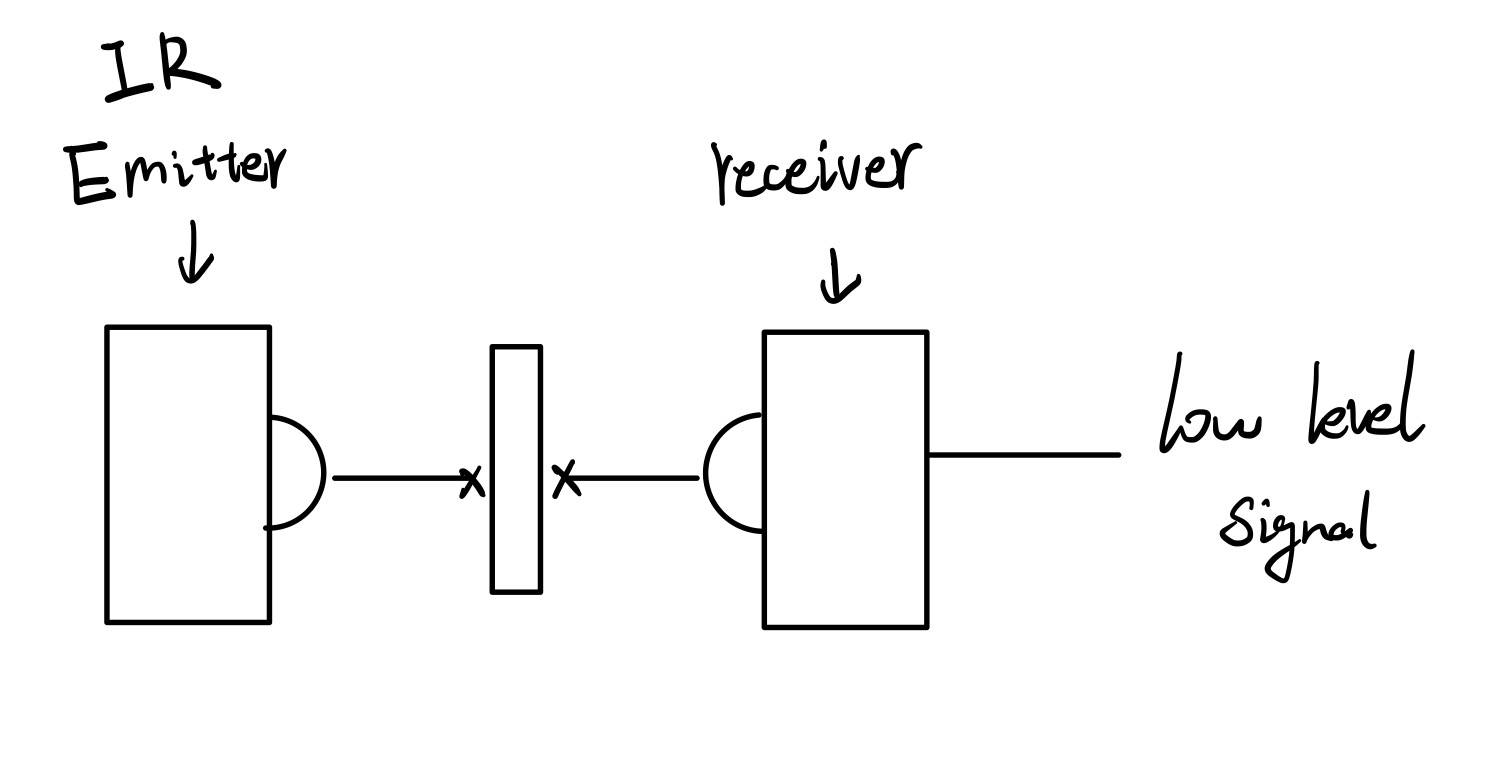
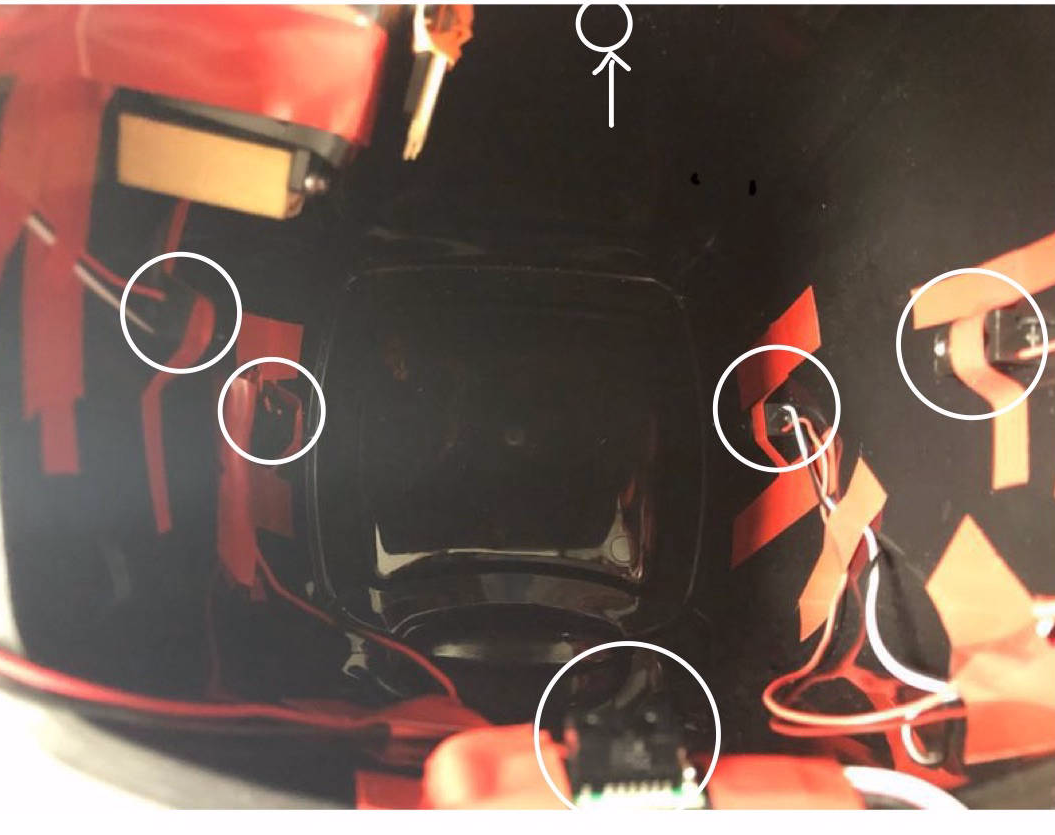
Hands-free system
Open and close the lid automatically when you are near by
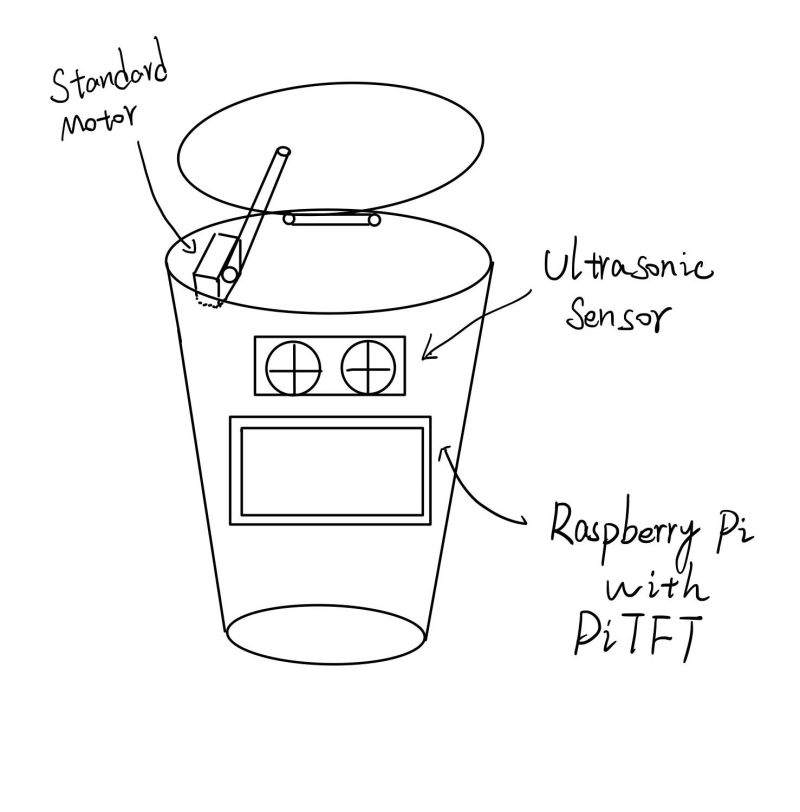
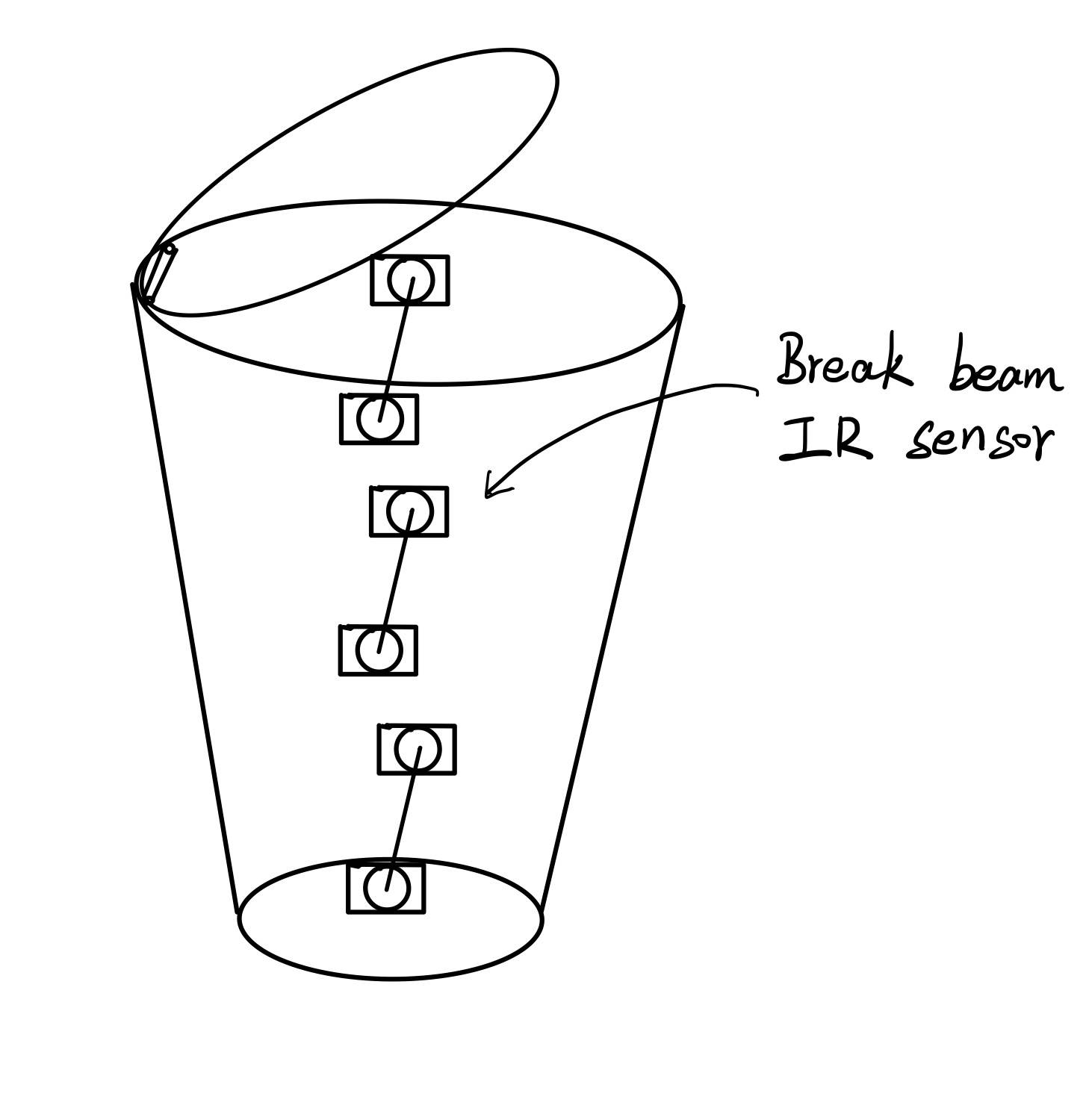
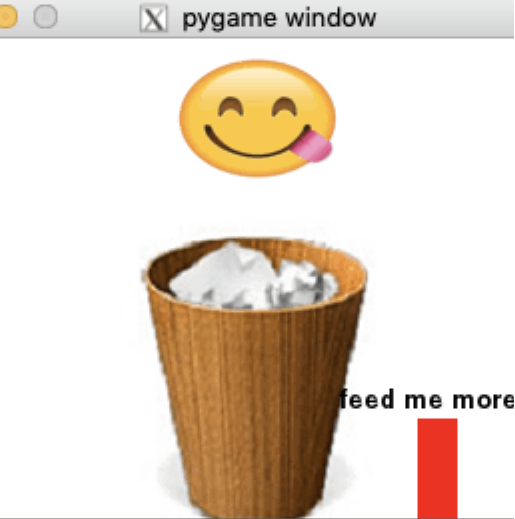
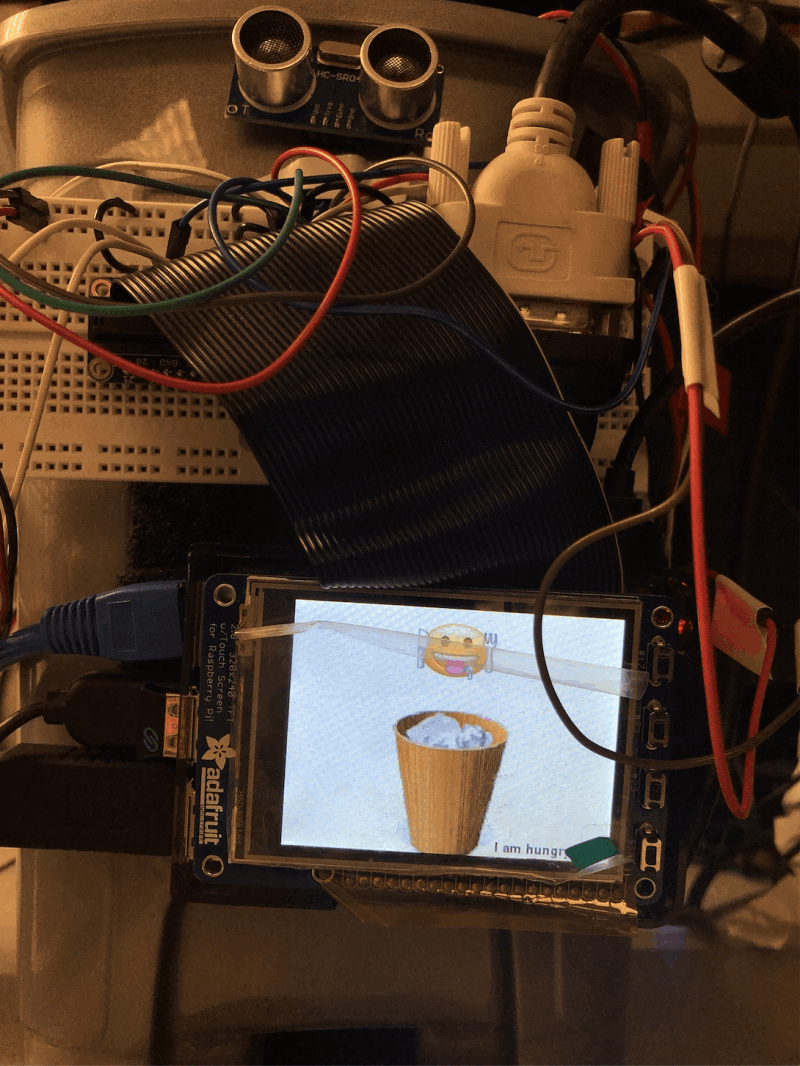
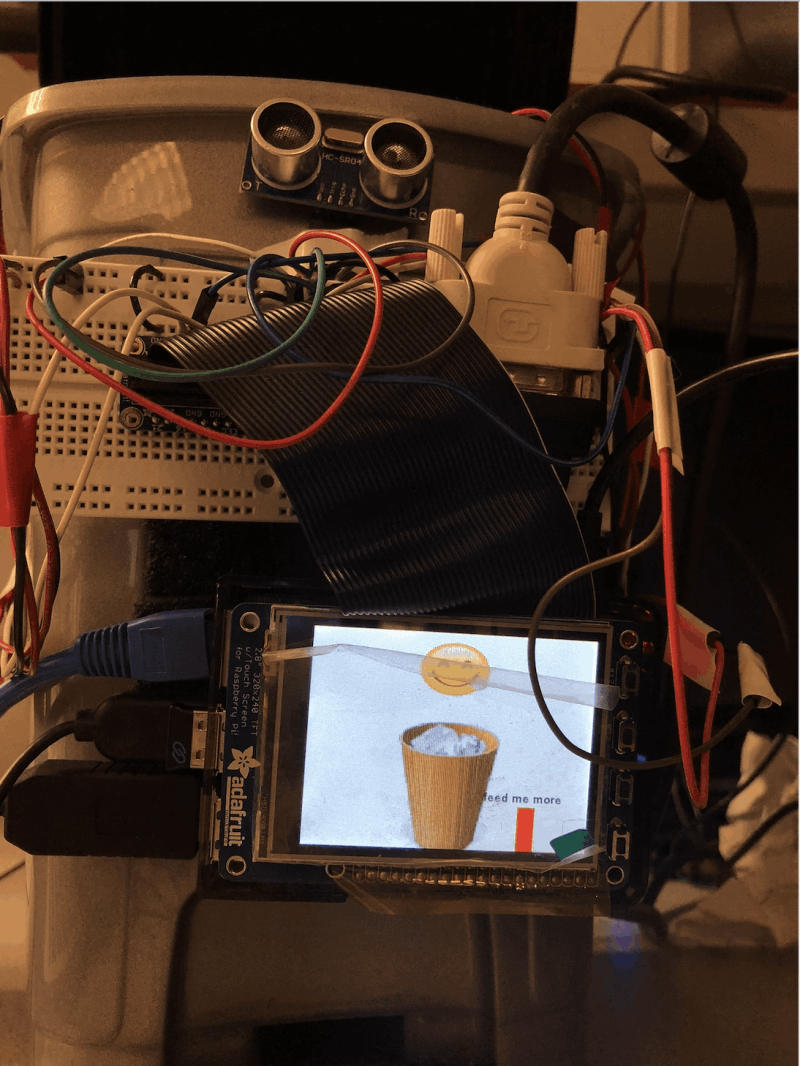
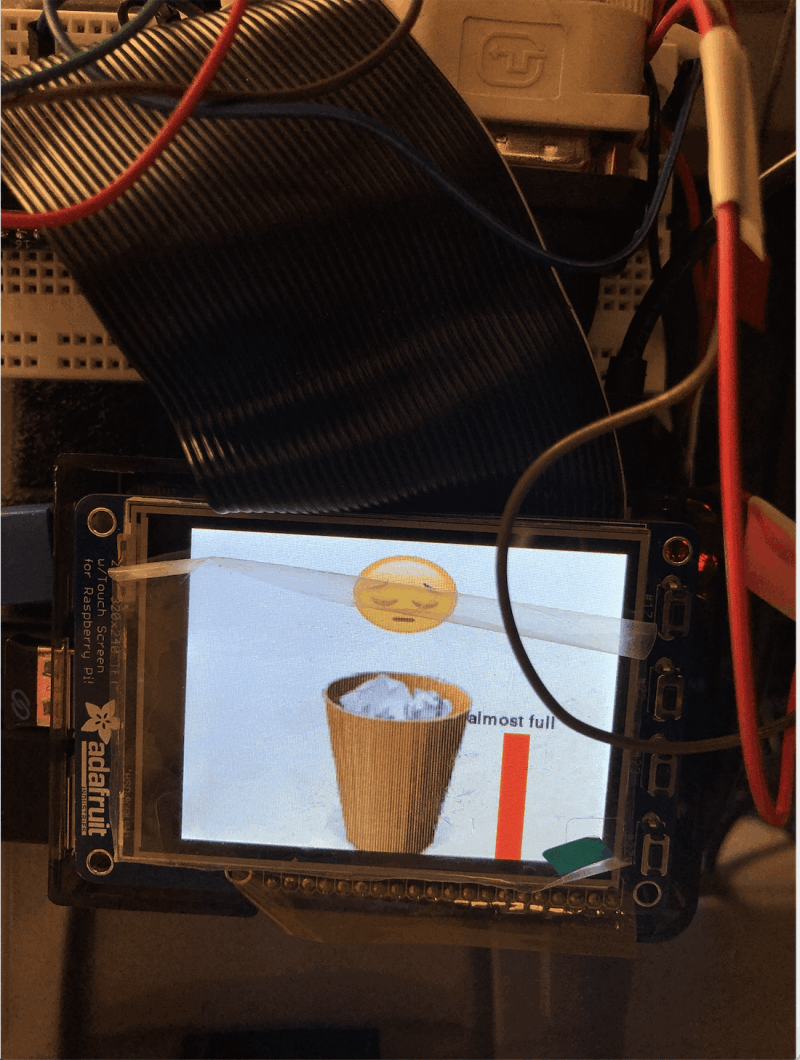
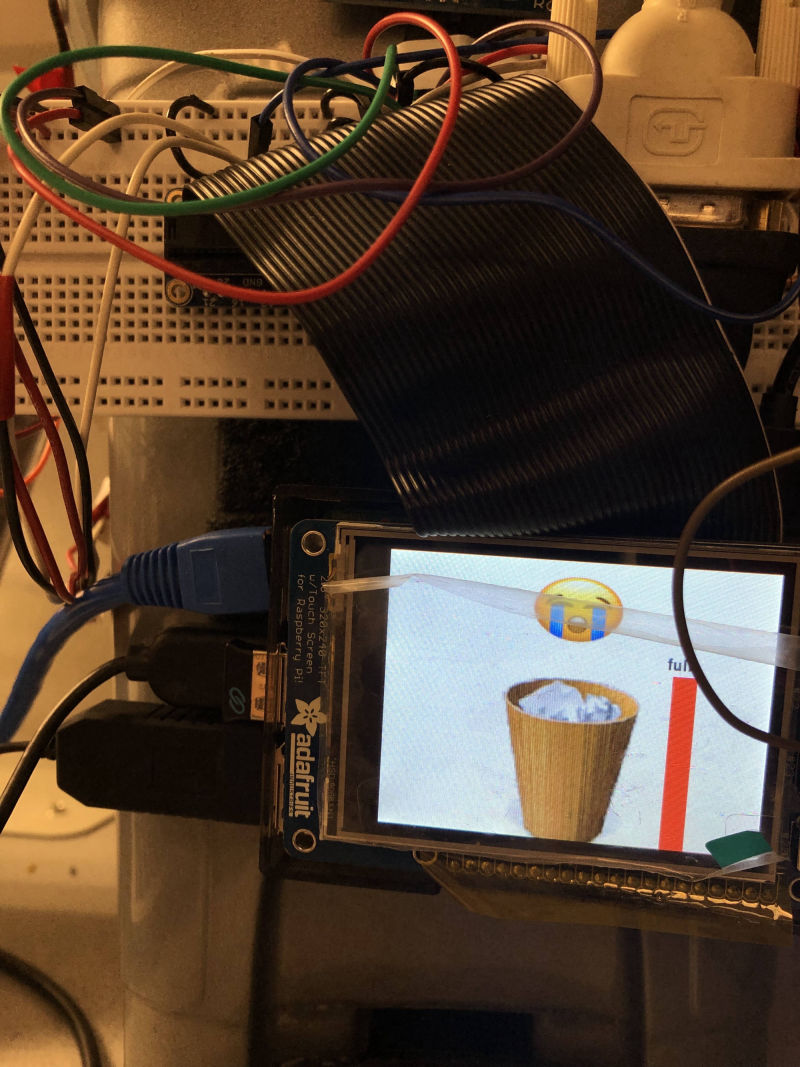
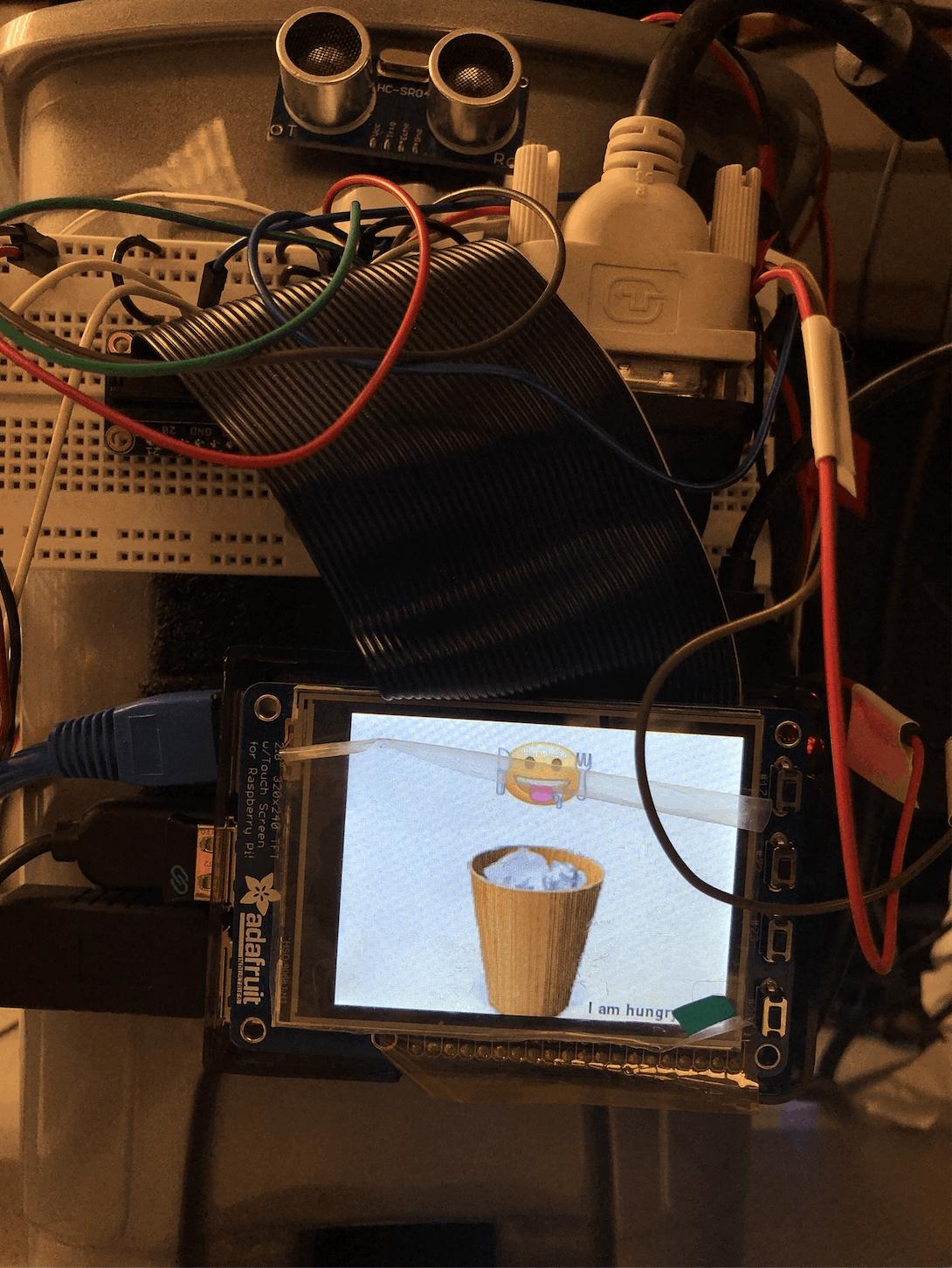
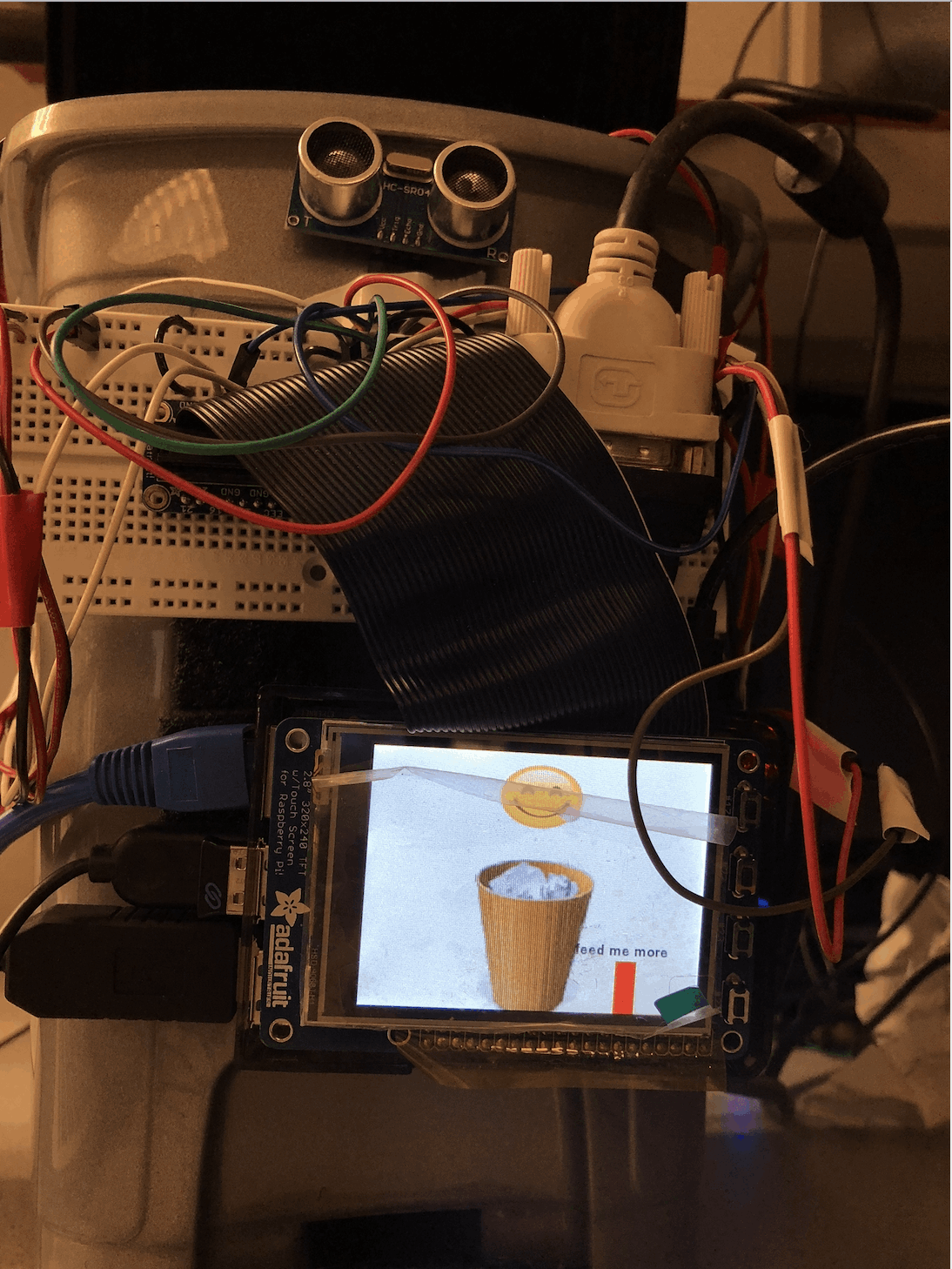
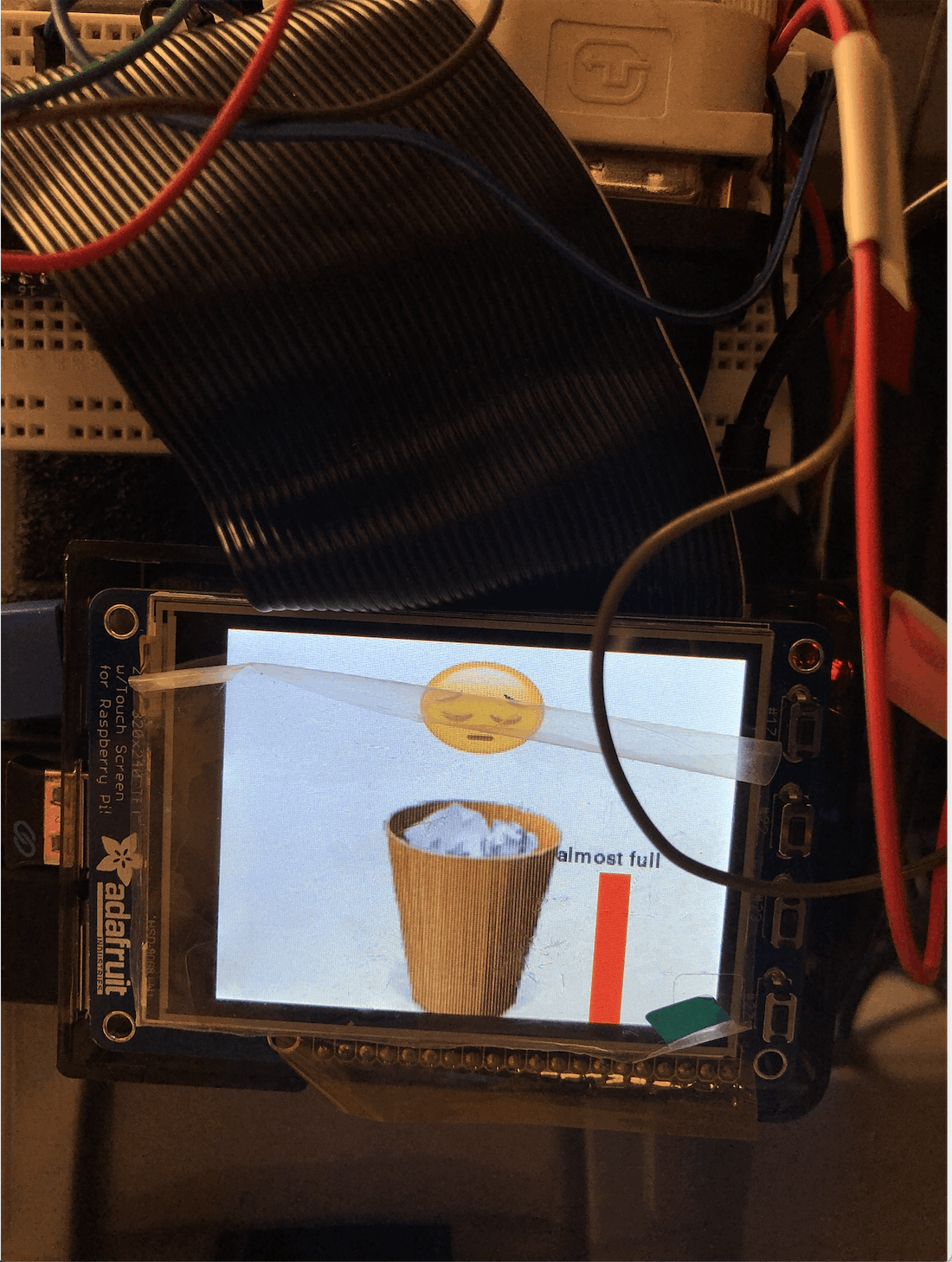
Emotion Display
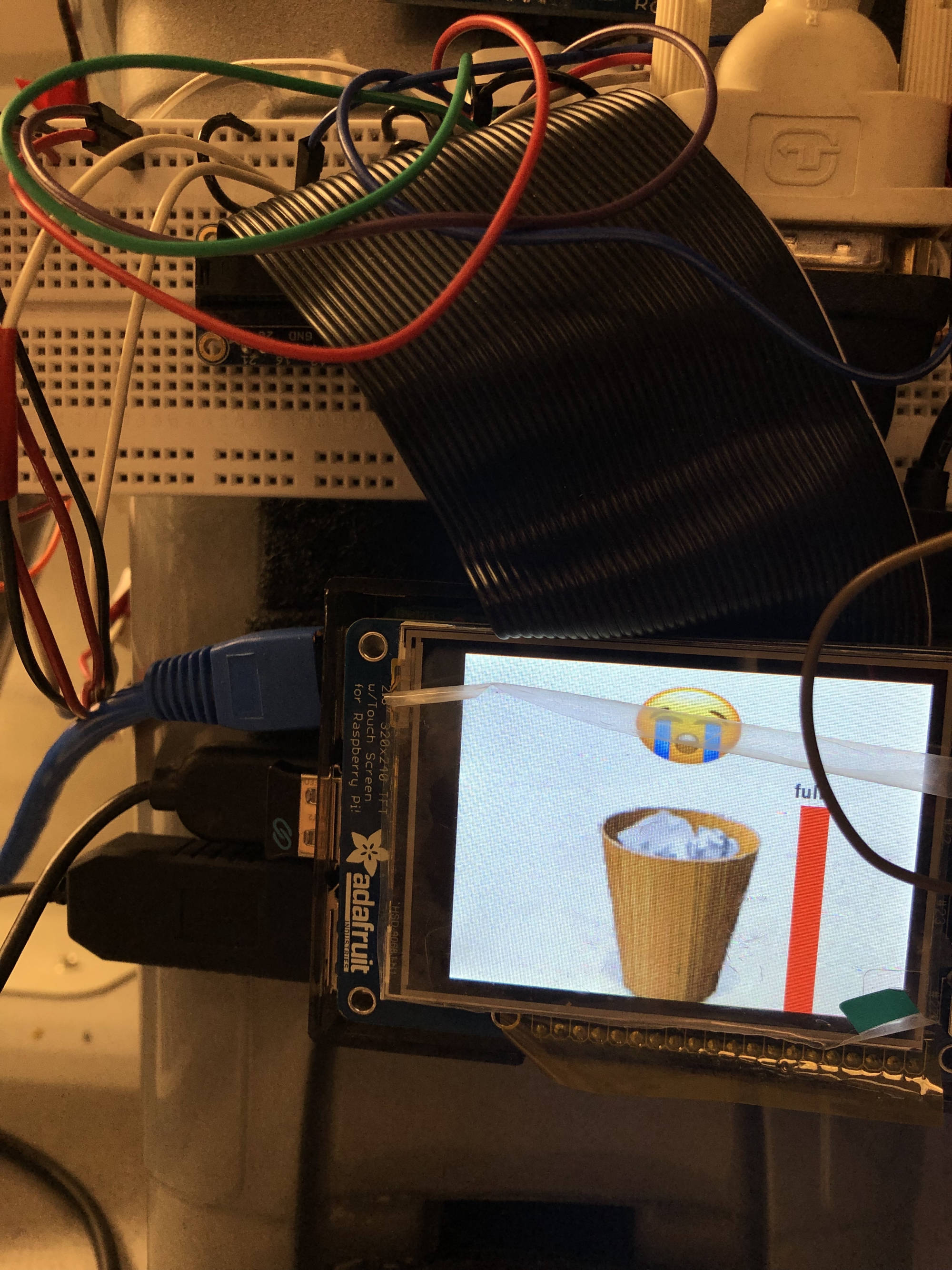
The trash can has its emotion. Its happiness depends on how full your trash can is. The emptier, the happier.
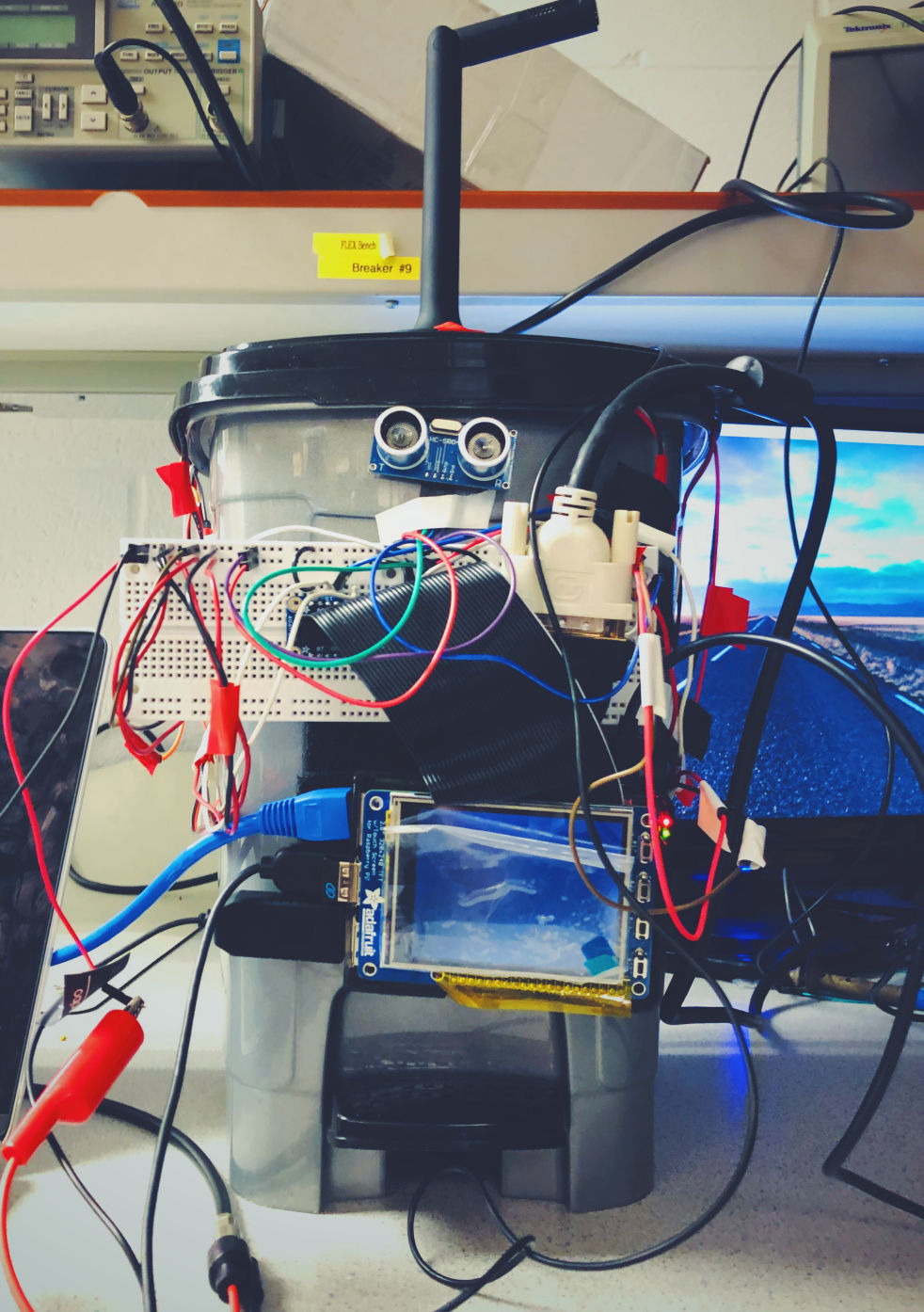
Voice Recognition Support
Open and close the lid automatically when you tell it to "open" or "close"
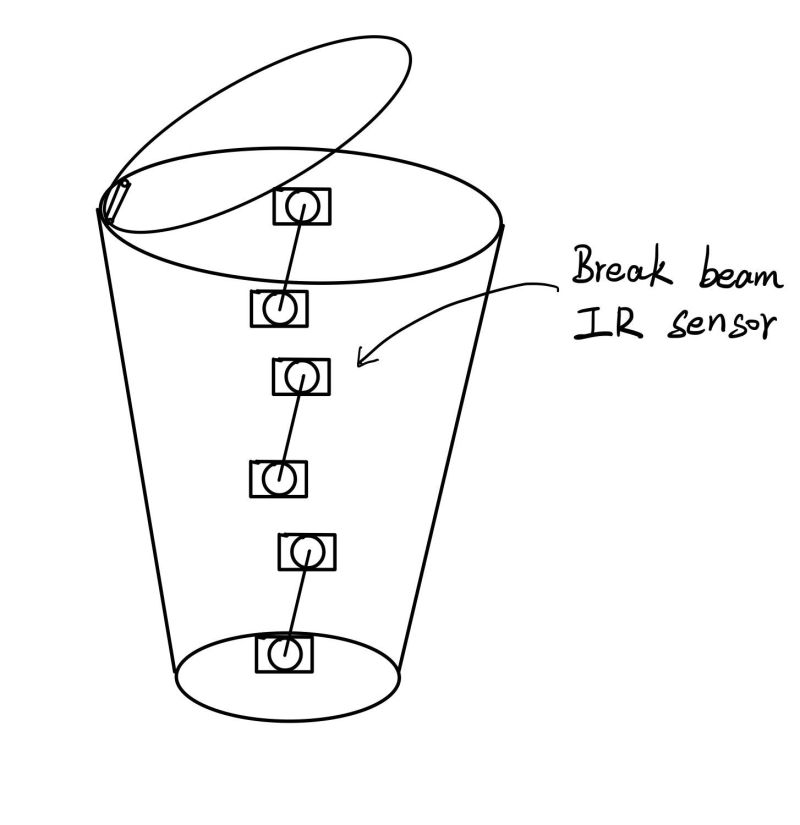
Email Reminder
Send you an email at the end of the day to remind you to empty the trash can if it gets full