Introduction
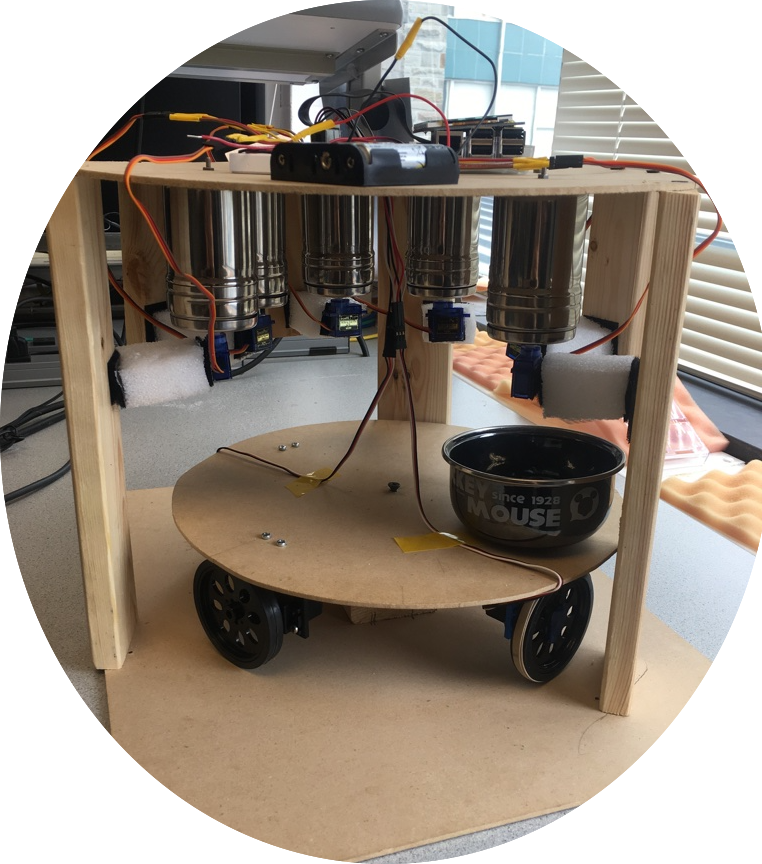
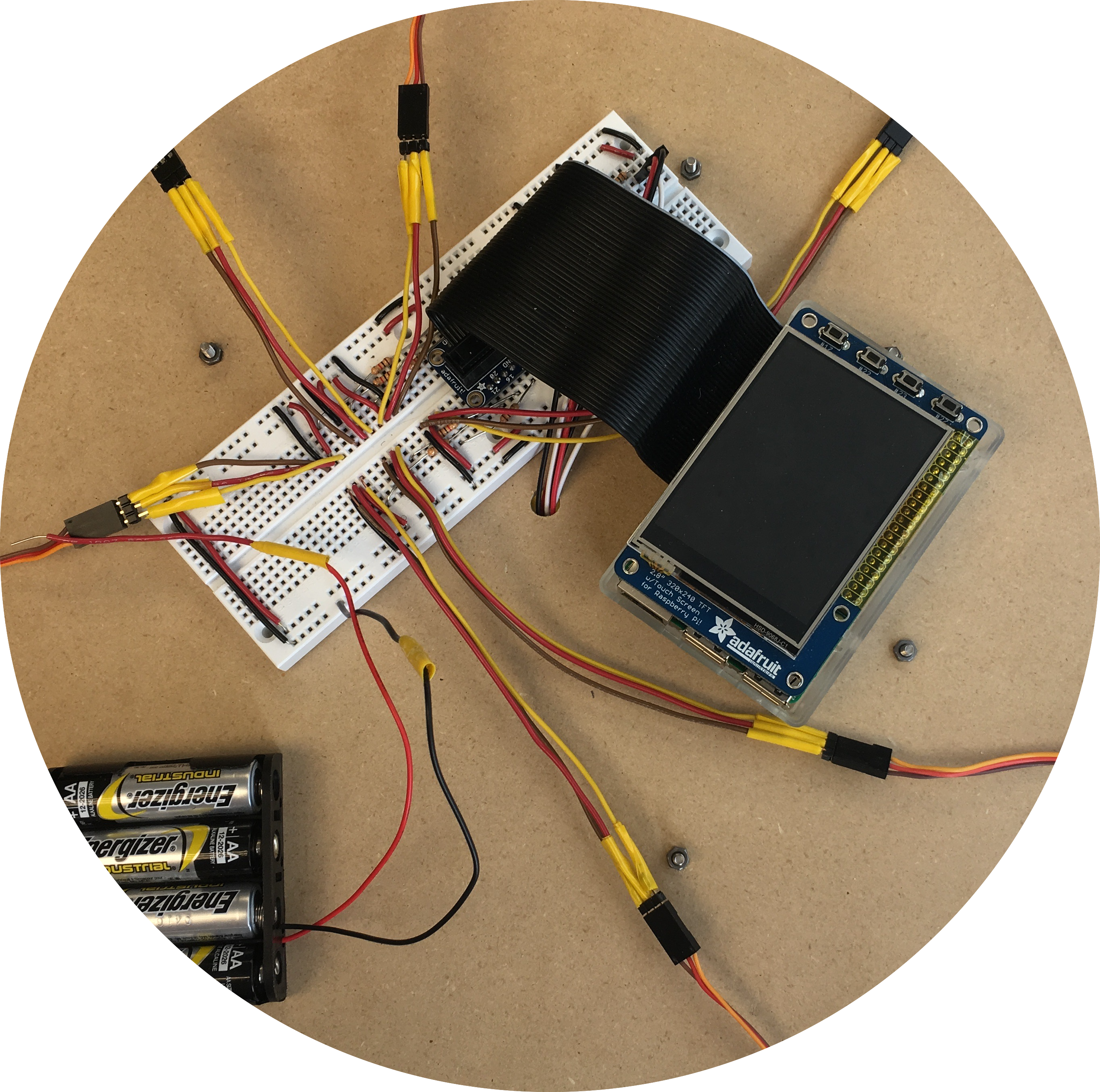
In this project, we build a cooking robot that takes in user input recipe via a user interface and automatically dispenses the available ingredients according to the user’s specifications. Our initial design assumes the following six ingredients: salt, sugar, MSG, garlic powder, ginger powder, and chili powder. The process of dispensing is 100% automated, and we made sure that the design is robust enough to approximate a real-life kitchen appliance. As shown in the figures, our robot holds six shaker cans that contain various ingredients, a rotatable plate that holds the bowl, and a Raspberry Pi - PiTFT set that serves as the robot’s “brain”.
The project involves both the hardware component and the software component. The hardware component includes the overall robot framework, the mechanical control for the shaker can cover rotation and the mechanical control for the bowl holder’s rotation. The software part contains the user interface that utilizes rendering on-screen elements, touch screen event detection, GPIO event detection for physical buttons on the PiTFT and software PWM control for the servos. The design of user interface and software GPIO control uses a significant amount of functions provided in pygame and RPi.GPIO library.
Zhengning Han zh62@cornell.edu  Yannan Wu yw348@cornell.edu
Yannan Wu yw348@cornell.edu