
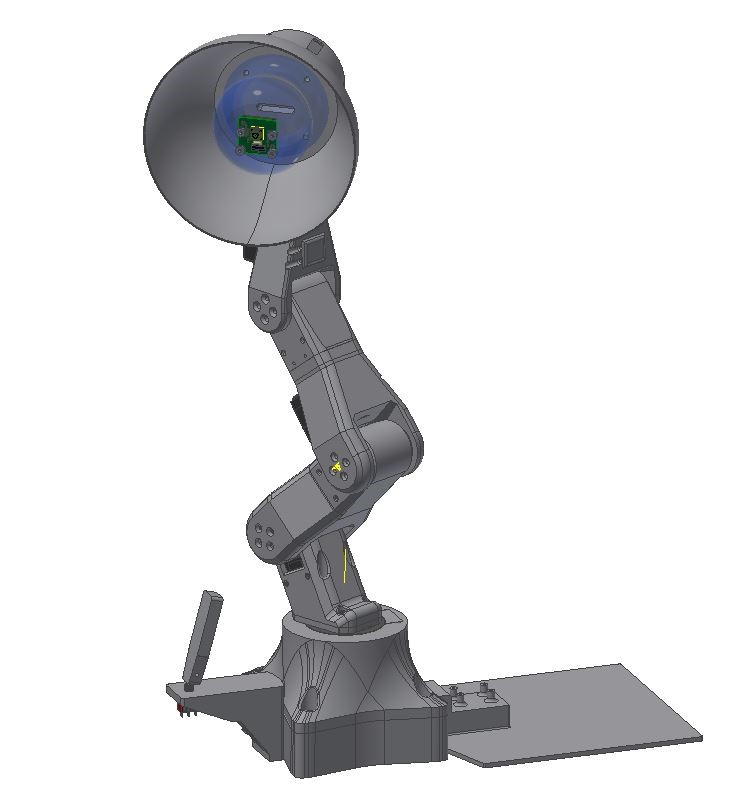
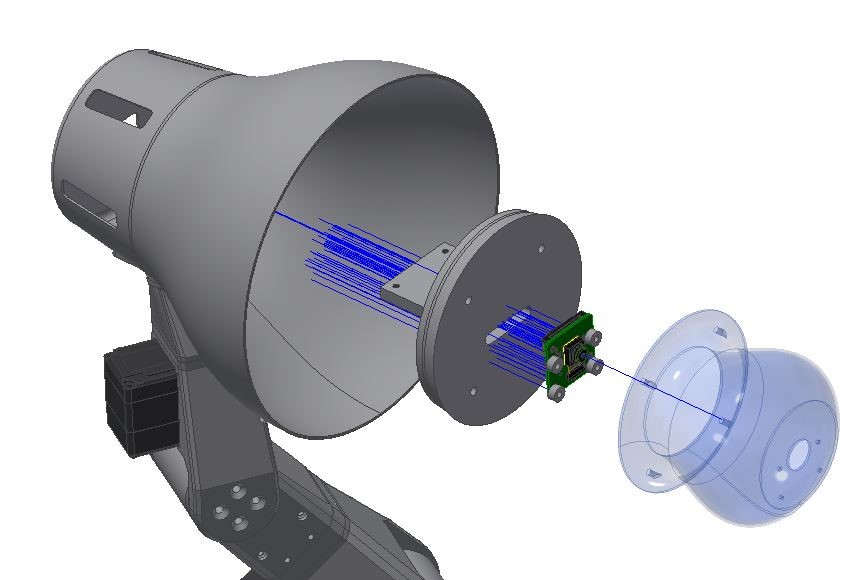
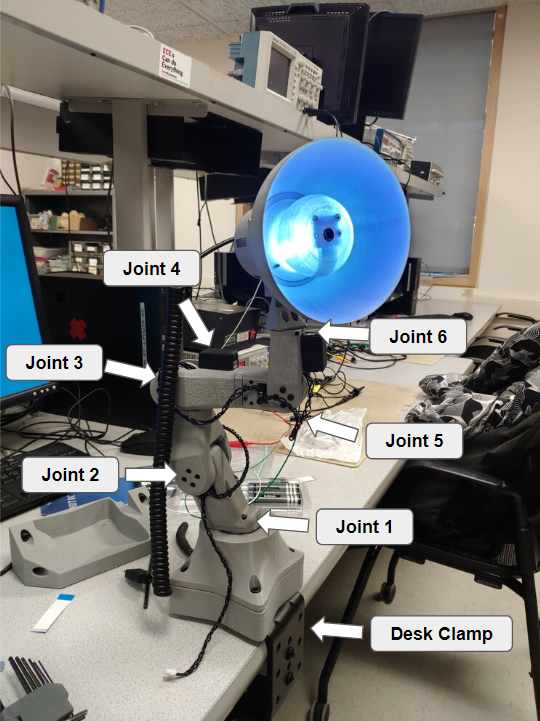
In this project, we built both the hardware and software for a social robot inspired by Pixar Animation Studio’s Luxo Jr.. For the base robot arm, we used the open-source mini 6-DOF manipulator platform that we developed (for our Master of Engineering project). The end-effector, which contains both the lamp and a Raspberry Pi camera, was custom designed and manufactured for this project. To achieve organic behavior, we implemented face-detection and tracking algorithms on the Raspberry Pi 3B+. In addition, we implemented teach and replay algorithms to train the robot arm for movement routines, in order to quickly and easily achieve sophisticated motion. Overall we were successful and created a robot that is lively and interacts with humans in its surroundings, powered by a resource-restricted embedded device.
We did the hardware and software testing separately in order to simplify the debugging of potential problems.
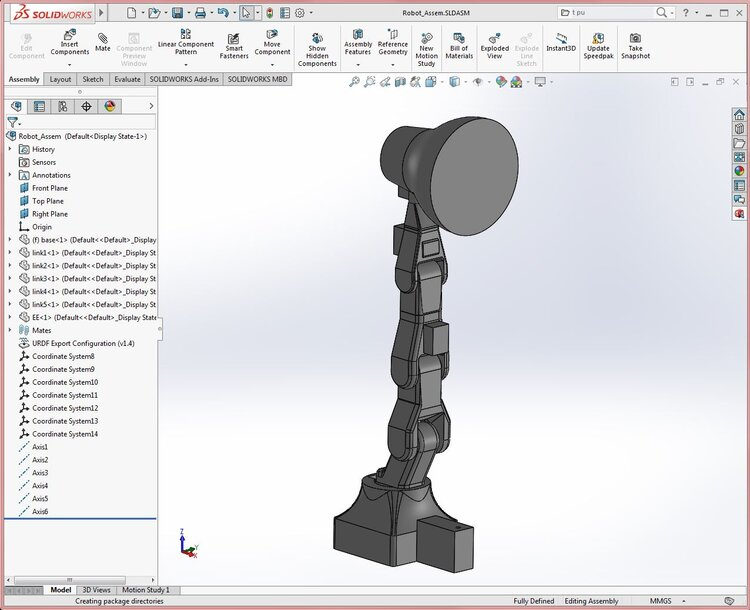
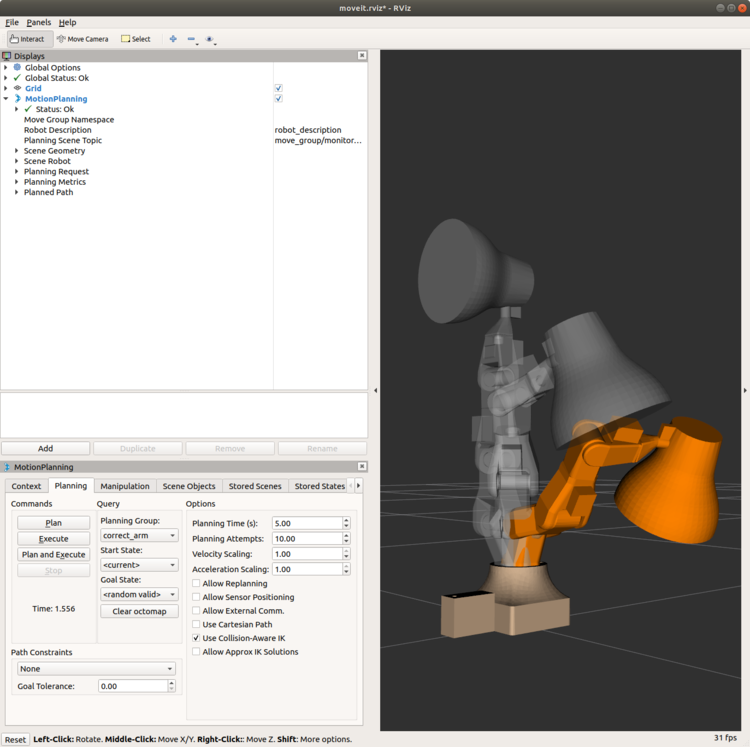
For mechanical hardware, most of the testing was done by assembling all the components in CAD, then moving
them around and ensuring there was no collision. Since load was not a large factor here, physical packaging
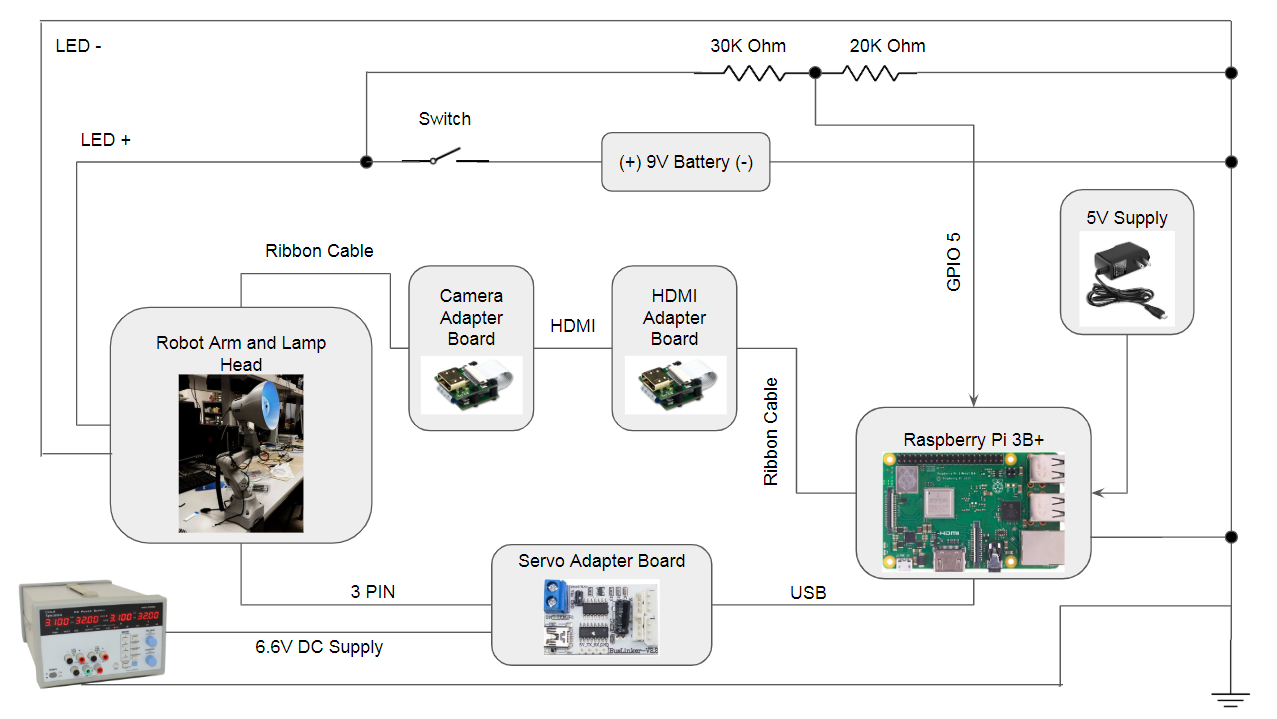
was the only concern here and the same testing was performed for the manufactured parts. For electrical
hardware, testing was done by building the circuits and measuring the signals with an oscilloscope before
connecting to the Pi. To debug the callback function issue, we looked at the trigger waveform on the scope but
saw nothing abnormal. Thus, we decided it was not worth our time to debug further as it may be a library
issue, so we just wrote our own multithreaded routine. The servos were rather straightforward as they are a
commercial part, and required no debugging.
For software, the key problem to solve was the RPi camera, so we made sure it functioned as expected before
starting any
complex code. We ran some basic video streaming routines to ensure its functionality. Then we ran all the
potentially helpful algorithms on our laptop. This way, we were
able to understand the algorithms in-depth and quickly gain intuition about the performance of each algorithm.
Then we adapted
the
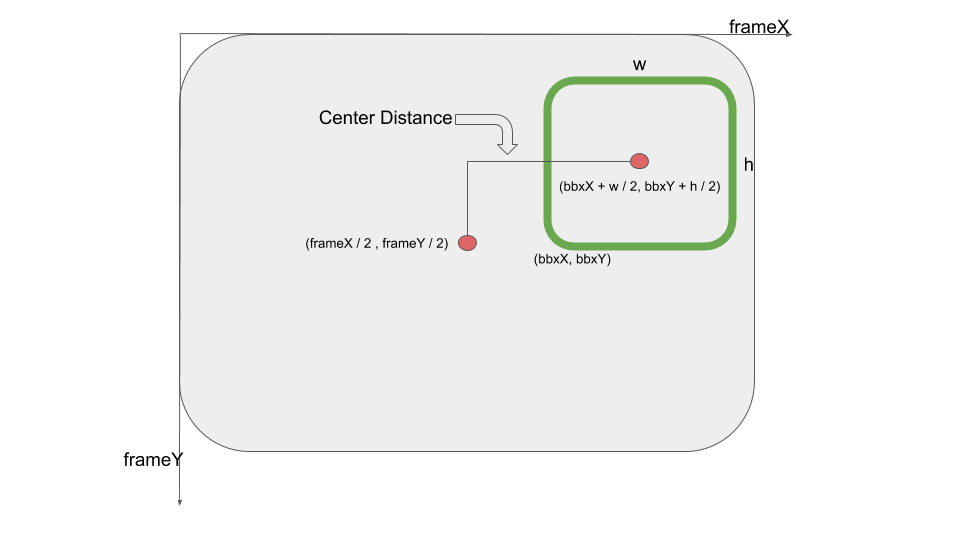
algorithms into the Pi and visualized the captured frames and the detected bounding boxes using OpenCV.
Furthermore, we printed the bounding boxes’ information in order to not only test the accuracy of our
algorithms
but also test the maximum frame rate. Despite all the challenges that we encountered, we managed to finish all
the testing and achieved our initial objectives before the demo date and become one of the first groups to
checkoff.
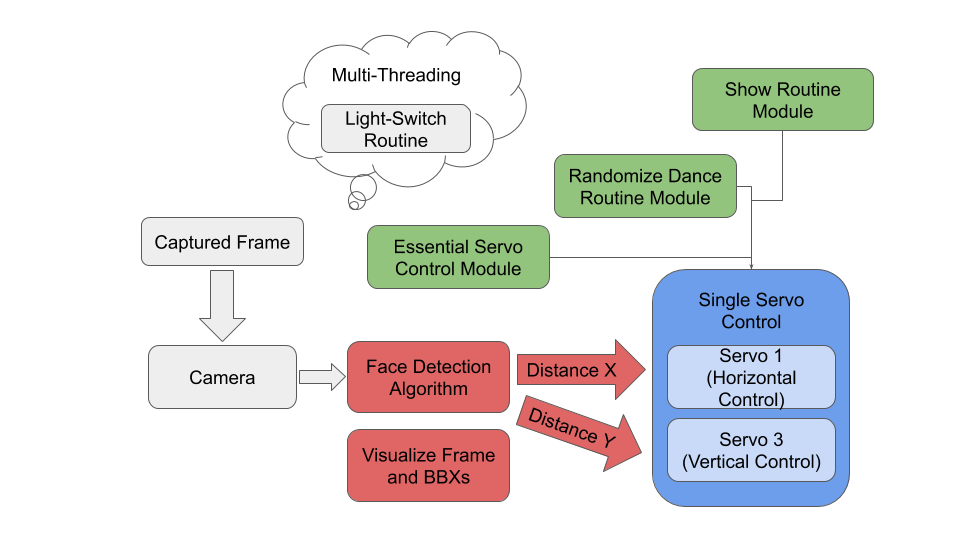
The first version of the integrated script worked well but the structure was not very readable, because we did
not modularize each function and instead directly put them following the data flow order. Then we encountered
problems when trying to modify some functions. So we realized that it was quite vulnerable to bugs and not
user-friendly. We improved the structure by doing encapsulation, modulation, and multi-threading as stated in
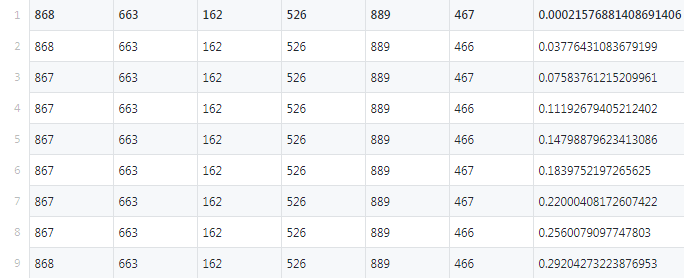
the code integration section. The individual functions of the arm were tested in separate scripts, and some
progress snapshots can be seen in the videos below.
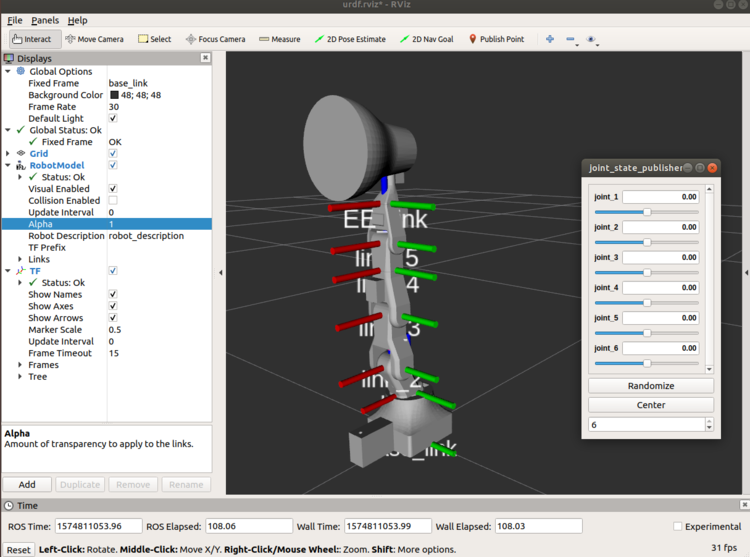
We achieved our initial expectation where we designed and manufactured the 6-DOF robot arm and
programmed it with sophisticated controls, developed efficient face detection algorithms and integrated them
into a stable
script.
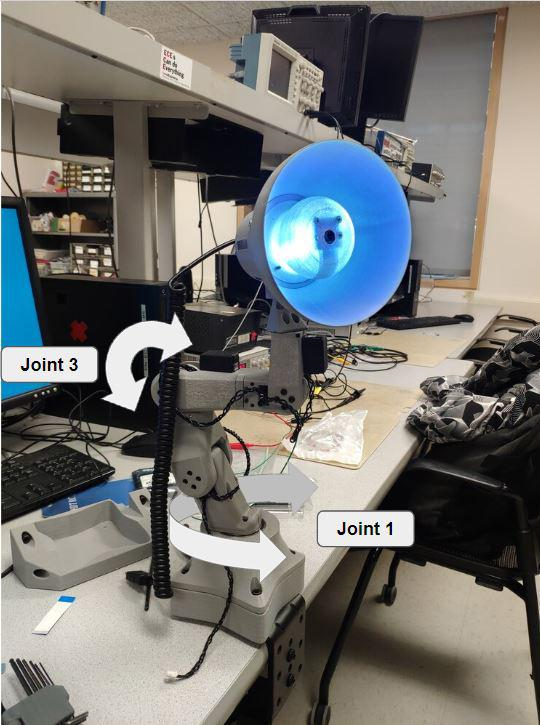
For software, we achieved high frame-rate (20-30 fps) face detection for real-time facial tracking on the
computation limited embedded system and safe servo control for showing various pre-recorded routines.
After integrating the whole system, even though there was still a little jitter when tracking faces, the robot
arm worked as expected.
Even though there remained inaccuracy of face detection due to the limited computational resources, our Pixar
Lamp
Robot met our objectives and was able to detect and track human faces. In addition, it was able to
perform
interesting postures randomly and then continue to do facial tracking. So we consider our project to be a
great
success. See the video below for a full demo.
If we had more time to work on the project, we would like to explore using the Nvidia Jetson Nano for running a neural network for face detection. According to Nvidia forum users, it is capable of running the MTCNN architecture at around 10fps, leveraging the Maxwell GPU onboard for inference. Also, it would be interesting to train a custom lightweight network to run on both single-board computers and evaluate its accuracy vs. existing deep networks. Also, our current robot arm control design can be improved by using a fully non-deterministic algorithm generator, although that may require extensive effort to design.
Note that the robot arm cost was not included, as that was built for a different project.
| Item Name | Price | Quantity |
|---|---|---|
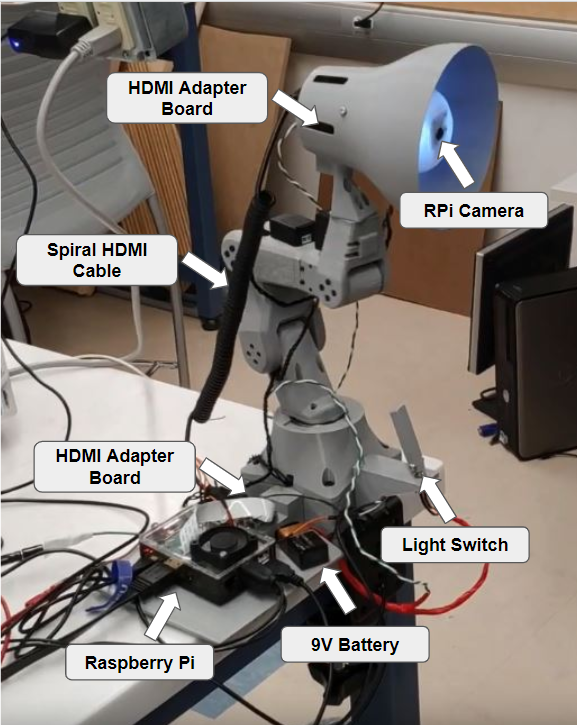
| Raspberry Pi Camera V2 | 21 | 1 |
| HDMI Adapter Board | 14 | 1 |
| Spiral HDMI Cable | 9 | 1 |
| LED Strip | 0.5 | 1 |
| Toggle Switch | 0.5 | 1 |
| M3 Screws | 1 | 1 |
| 3D Printing Filament | 20 | 1/2 Roll |
| Total | $56 |
# import the necessary packages from imutils.video import VideoStream import argparse import imutils import time import cv2 import os import numpy import random import serial import csv import RPi.GPIO as GPIO from threading import Thread GPIO.setmode(GPIO.BCM) GPIO.setup(5, GPIO.IN, pull_up_down=GPIO.PUD_DOWN) # define global variable global joint_id global command global off_mode global light_on_sw global show_now show_now = False light_on_sw = False off_mode = True # initialize servo id and postion joint_id = { #[real servo id, home position] "joint_1": [5, 852], "joint_2": [1, 597], "joint_3": [2, 135], "joint_4": [4, 510], "joint_5": [6, 900], "joint_6": [3, 474] } def show_routine(routine_file): # show robot dance routine # para: # routine_file: a recorded CSV file global joint_id global show_now global light_on_sw global command if not light_on_sw: show_now = True init_time = time.time() duration = 0 with open(routine_file) as csvfile: pamreader = csv.reader(csvfile, delimiter=',') for row in pamreader: duration = time.time() - init_time try: newrow = list(map(float, row)) except Exception: continue rec_time = newrow[-1] while (duration < rec_time): duration = time.time() - init_time time.sleep(0.0000001) ind = 0 for key in joint_id.keys(): servoWriteCmd(joint_id[key][0], command["SERVO_MODE_WRITE"], 0) servoWriteCmd(joint_id[key][0], command["MOVE_WRITE"], int(newrow[ind]), 0) ind += 1 for key in joint_id.keys(): servoWriteCmd(joint_id[key][0], command["SERVO_MODE_WRITE"], 0) servoWriteCmd(joint_id[key][0], command["MOVE_WRITE"], joint_id[key][1], 0) show_now = False def GPIO5cb(): # listen GPIO 5 and show light-switch routine # as long as the switch is off # two modes (fast mode and slow mode) for this routine global light_on_sw global joint_id global command global off_mode while True: time.sleep(1) if light_on_sw and not show_now: if off_mode: off_file = 'light_off.csv' else: off_file = 'light_off2.csv' off_mode = not off_mode for key in joint_id.keys(): servoWriteCmd(joint_id[key][0], command["SERVO_MODE_WRITE"], 0) servoWriteCmd(joint_id[key][0], command["MOVE_WRITE"], joint_id[key][1], 0) time.sleep(1.5) init_time = time.time() duration = 0 with open(off_file) as csvfile: pamreader = csv.reader(csvfile, delimiter=',') for row in pamreader: duration = time.time() - init_time try: newrow = list(map(float, row)) except Exception: continue rec_time = newrow[-1] while (duration < rec_time): duration = time.time() - init_time time.sleep(0.0000001) ind = 0 for key in joint_id.keys(): servoWriteCmd(joint_id[key][0], command["SERVO_MODE_WRITE"], 0) servoWriteCmd(joint_id[key][0], command["MOVE_WRITE"], int(newrow[ind]), 0) ind += 1 togg = True tog_speed = 1000 times = 0 while tog_speed >= 150: time.sleep(0.03) if togg: servoWriteCmd(joint_id["joint_6"][0], command["SERVO_MODE_WRITE"], 1, tog_speed) else: servoWriteCmd(joint_id["joint_6"][0], command["SERVO_MODE_WRITE"], 1, -tog_speed) togg = not togg if times < 2: times += 1 else: tog_speed -= 150 times = 0 light_on_sw = False servoWriteCmd(joint_id["joint_6"][0], command["SERVO_MODE_WRITE"], 0) servoWriteCmd(joint_id['joint_3'][0], command["MOVE_WRITE"], 250, 0) # initialize and start the light-switch deamon light_off_thread = Thread(target=GPIO5cb, daemon=True) light_off_thread.daemon = True light_off_thread.start() # initialize serial and servo command serialHandle = serial.Serial("/dev/ttyUSB0", 115200) #115200 baud rate command = { "MOVE_WRITE": 1, "POS_READ": 28, "SERVO_MODE_WRITE": 29, "LOAD_UNLOAD_WRITE": 31, "SERVO_MOVE_STOP": 12, "TEMP_READ": 26 } #No need to split into higher and lower bytes, this function does it already. Parameter # is # of different params. def servoWriteCmd(id, cmd, par1=None, par2=None): # write commands to servos # para: # id: servo id # cmd: real command buf = bytearray(b'\x55\x55') try: len = 3 #length is 3 if no commands buf1 = bytearray(b'') ## verify data if par1 is not None: len += 2 #add 2 to data length buf1.extend([ (0xff & par1), (0xff & (par1 >> 8)) ]) #split into lower and higher bytes, store in buffer if par2 is not None: len += 2 buf1.extend([ (0xff & par2), (0xff & (par2 >> 8)) ]) #split into lower and higher bytes, store in buffer buf.extend([(0xff & id), (0xff & len), (0xff & cmd)]) buf.extend(buf1) ## checksum sum = 0x00 for b in buf: #sum sum += b sum = sum - 0x55 - 0x55 #remove two beginning 0x55 sum = ~sum #take not buf.append(0xff & sum) #add lower byte into buffer serialHandle.write(buf) #send except Exception as e: print(e) def readPosition(id): # read the position of each servo # para: # id: servo id serialHandle.flushInput() servoWriteCmd(id, command["POS_READ"]) #send read command time.sleep(0.0055) #delay count = serialHandle.inWaiting() #get number of bytes in serial buffer pos = None if count != 0: #if not empty recv_data = serialHandle.read(count) #read data if count == 8: #if it matches expected data length if recv_data[0] == 0x55 and recv_data[1] == 0x55 and recv_data[ 4] == 0x1C: #first and second bytes are 0x55, fifth byte is 0x1C (28), which is read position command pos = 0xffff & (recv_data[5] | (0xff00 & (recv_data[6] << 8)) ) #combine data for valid read return pos def readTemperature(id): # read the temperature of each servo # para: # id: servo id serialHandle.flushInput() servoWriteCmd(id, command["TEMP_READ"]) #send read command time.sleep(0.01) #delay count = serialHandle.inWaiting() #get number of bytes in serial buffer tem = None if count != 0: #if not empty recv_data = serialHandle.read(count) #read data if count == 7: #if it matches expected data length if recv_data[0] == 0x55 and recv_data[1] == 0x55 and recv_data[ 4] == 0x1A: #first and second bytes are 0x55, fifth byte is 0x1A (26), which is read temperature command tem = recv_data[5] return tem # construct the argument parser and parse the arguments ap = argparse.ArgumentParser() ap.add_argument("-c", "--cascade", required=True, help="path to where the face cascade resides") args = vars(ap.parse_args()) # load OpenCV's Haar cascade for face detection from disk detector = cv2.CascadeClassifier(args["cascade"]) # initialize the video stream, allow the camera sensor to warm up # the size of captured frames is set to width=320, height=240 # frame per second is 32 print("[INFO] starting video stream...") # vs = VideoStream(src=0).start() vs = VideoStream(usePiCamera=True, resolution=(320, 240), framerate=32).start() time.sleep(2.0) total = 0 #servo control variables cont_var = 0 last_input = True dist_center_x = 0 hinc = 1 linc = 1 show_time = time.time() d_lim = 30 t_duration = 0 t_init = time.time() # loop over the frames from the video stream while True: # grab the frame from the threaded video stream and resize the frame # resize the frame size with fixed width/height ratio => width=400, height=300 frame = vs.read() frame = imutils.resize(frame, width=400) # detect faces in the grayscale frame rects = detector.detectMultiScale(cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY), scaleFactor=1.1, minNeighbors=5, minSize=(60, 60)) # camera center coordinates camera_center_x = 200 camera_center_y = 150 # loop over the face detections and control the servos # if the camera does detects some faces, then further # control the robot. Otherwise, it does not move if len(rects) > 0: # refine the bounding boxes by using only the maximum area bbx arr = numpy.zeros((len(rects), 1)) for idx, (x, y, w, h) in enumerate(rects, start=1): arr[idx - 1] = w * h max_ind = numpy.argmax(arr) x, y, w, h = rects[max_ind] # draw the bounding box on the original frame cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2) # the bounding box center coordinates bbx_center_x = x + w / 2 bbx_center_y = y + h / 2 # center distance dist_center_x = camera_center_x - bbx_center_x dist_center_y = camera_center_y - bbx_center_y print('---------------------------------------------------') print( 'Index: {} Camear center: {} Face center: {} Distance: {}'.format( idx, (camera_center_x, camera_center_y), (bbx_center_x, bbx_center_y), (dist_center_x, dist_center_y))) # read the position of joint 1 and 3 pos = readPosition(joint_id['joint_1'][0]) pos2 = readPosition(joint_id['joint_3'][0]) if pos: print('joint 1 position: {}'.format(pos)) # limit the movement angle for joint 1 if ((pos < 300) and (dist_center_x < 0)): servoWriteCmd(joint_id['joint_1'][0], command["SERVO_MODE_WRITE"], 1, abs(int(2 * dist_center_x))) elif ((pos > 900) and (dist_center_x > 0)): servoWriteCmd(joint_id['joint_1'][0], command["SERVO_MODE_WRITE"], 1, -abs(int(2 * dist_center_x))) else: servoWriteCmd(joint_id['joint_1'][0], command["SERVO_MODE_WRITE"], 1, int(3 * dist_center_x)) if pos2: print('joint 3 position: {}'.format(pos2)) # limit the movement angle for joint 3 if pos2 > 150 : if dist_center_y < 0: if linc < 100: linc += 1 hinc = 1 servoWriteCmd(joint_id['joint_3'][0], command["SERVO_MODE_WRITE"], 0) servoWriteCmd(joint_id['joint_3'][0], command["MOVE_WRITE"], pos2 - linc, 0) if pos2 < 900: if dist_center_y > 0: linc = 1 if hinc < 500: hinc += 1 servoWriteCmd(joint_id['joint_3'][0], command["SERVO_MODE_WRITE"], 0) servoWriteCmd(joint_id['joint_3'][0], command["MOVE_WRITE"], pos2 + hinc, 0) print(pos2 + hinc) else: servoWriteCmd(joint_id['joint_1'][0], command["SERVO_MODE_WRITE"], 1, 0) # show dance routine randomly duration = time.time() - show_time if duration > d_lim: print('show') duration = 0 show_time = time.time() d_lim = random.randint(90, 180) f_ind = random.randint(1, 7) show_routine('rand_rout' + str(f_ind) + '.csv') # show the output frame cv2.imshow("Frame", frame) key = cv2.waitKey(1) & 0xFF t_duration = time.time() - t_init if t_duration > 5: t_init = time.time() tem_out = [] for key in joint_id.keys(): tem_out.append(readTemperature(joint_id[key][0])) print(tem_out) now_input = GPIO.input(5) if not now_input and not last_input: cont_var += 1 else: cont_var = 0 if cont_var > 6: cont_var = -10 light_on_sw = True last_input = now_input # do a bit of cleanup print("[INFO] {} face images stored".format(total)) print("[INFO] cleaning up...") cv2.destroyAllWindows() vs.stop()